

Robot job task generation method based on workpiece model
A task and robot technology, applied in the direction of instruments, manipulators, manufacturing tools, etc., can solve the problems of high computer performance requirements, low software openness, limited types of robots, etc., to reduce the error rate, flexible and efficient settings, large Versatile and flexible effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] Below in conjunction with embodiment the present invention will be further described.
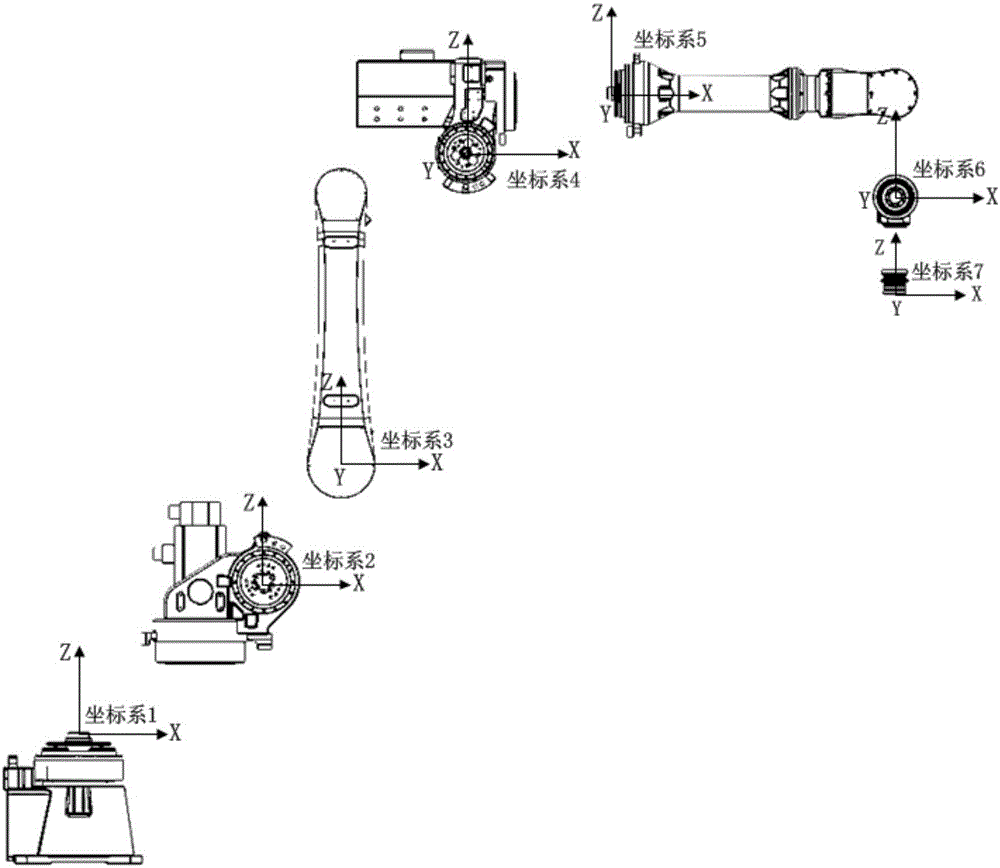
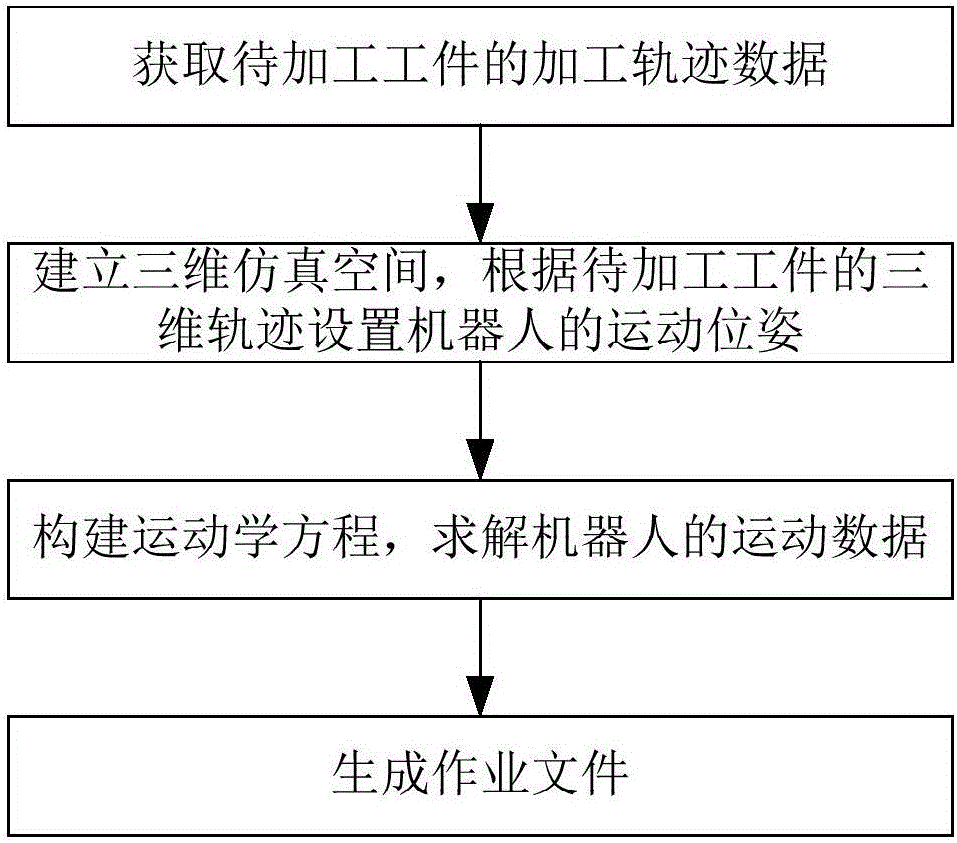
[0026] In the present invention, the robot operation task generation method based on the workpiece model, such as figure 1As shown, by extracting the processing trajectory data from the CAD model of the workpiece to be processed, and then using the 3D simulation space, the target trajectory of the robot is set according to the processing trajectory data, and the motion posture of the robot is set according to the 3D solid model of the workpiece to be processed, and then the robot is used to The target trajectory and motion pose data are obtained by solving the robot kinematic equations to obtain the motion data of the robot, and finally the job file is generated according to the motion data. Specifically include the following steps:
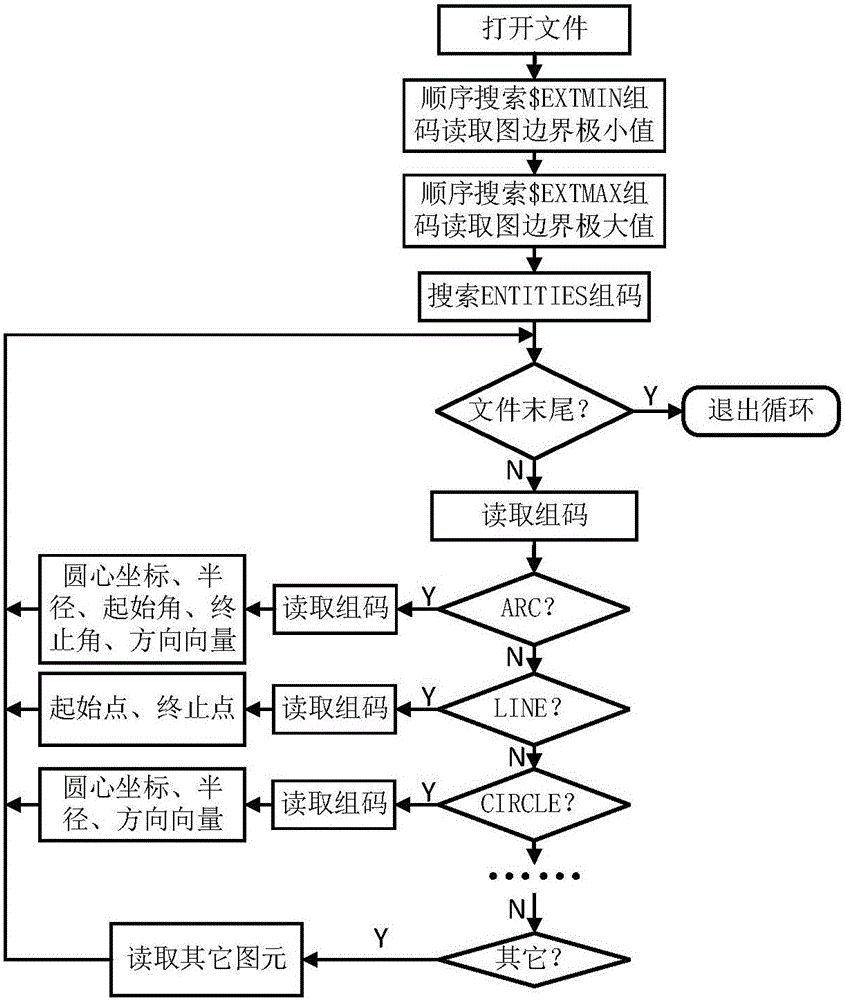
[0027] (1) Obtain the processing trajectory data in the workpiece model
[0028] 1) Analyze the processing trajectory data contained in the DXF file ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More