

Design method for sliding mode disturbance observer used for servo system control
A disturbance observer and servo system technology, applied in control systems, DC motor speed/torque control, electrical components, etc., can solve problems such as large gain chattering, meet the requirements of reducing modeling accuracy and improve robustness and anti-interference ability, reducing the effect of jitter problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0041] A design method for a sliding mode disturbance observer for servo system control, the steps are as follows:
[0042] 1. Design of sliding mode controller
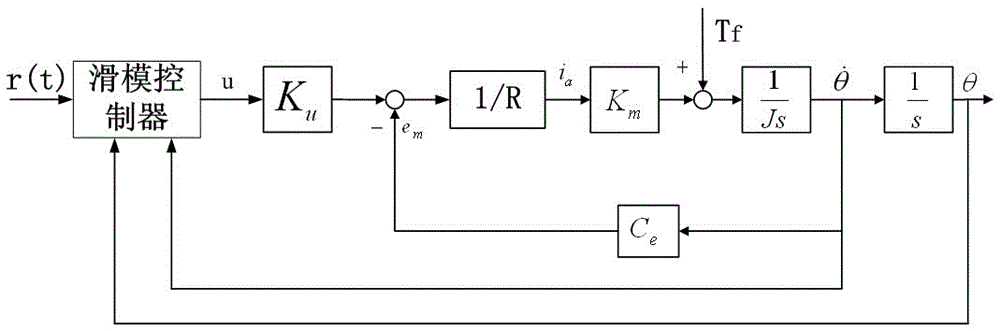
[0043] like figure 1 It means that a sliding mode controller is used to control a servo system affected by friction. First, the state equation of the servo system is established as shown in equation (1):
[0044]
[0045] where r(t) is the command signal, u is the control input, C e is the back EMF coefficient of the motor, K u is the amplification factor of the PWM drive, R is the armature resistance, K m is the moment coefficient, J is the moment of inertia, T f Indicates the frictional disturbance torque. state variable x 1 represents the angle of rotation, x 2 Indicates rotational speed.
[0046] The tracking errors of angular position and angular velocity are respectively
[0047] e=r-x 1 (2)
[0048]
[0049] Design switching function
[0050]
[0051] Exponential Reach Law
[0052]
...
Embodiment 2
[0070] Known parameters of the controlled motor servo system: R=14.7Ω, K m =1.134N m / A, C e =0.119V / (r / min), J=1.79*10 -6 kg*m 2 , K u = 12.
[0071] The transfer function of the motor is
[0072]
[0073] Select the parameter τ=0.001ms of the low-pass filter Q(s), then
[0074]
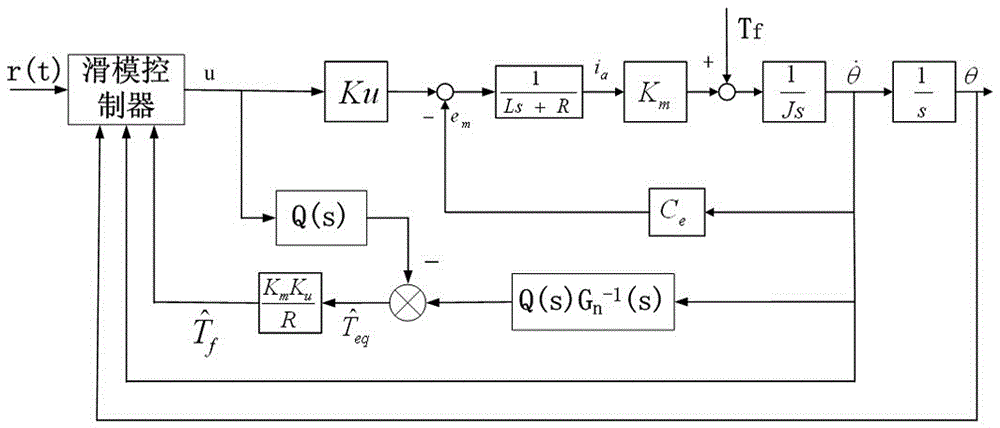
[0075] Then according to Q(s) and G p (s), construct a disturbance observer to get the estimated value of friction torque Select c=30, k=1, ε=1 as the control parameters to design the control rate u.
[0076]
[0077] Through computer simulink simulation, compare the quality of PID control and sliding mode disturbance observer control.
[0078] First, the double closed-loop PID control of the speed loop and the position loop is used. The rule for selecting PID parameters is: first, regardless of the nonlinear friction part of the motor, the PID coefficients of the speed loop and the position loop are determined in turn by the critical proportionality method, and then the coefficient...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More