Rollover-preventing control system and method for four-wheel steering automobile integrating change of automobile speed
A four-wheel steering vehicle and control system technology, which is applied in the field of four-wheel steering vehicle anti-rollover control system, can solve problems such as inaccurate rollover evaluation indicators, and achieve the effect of improving control efficiency and optimal control effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
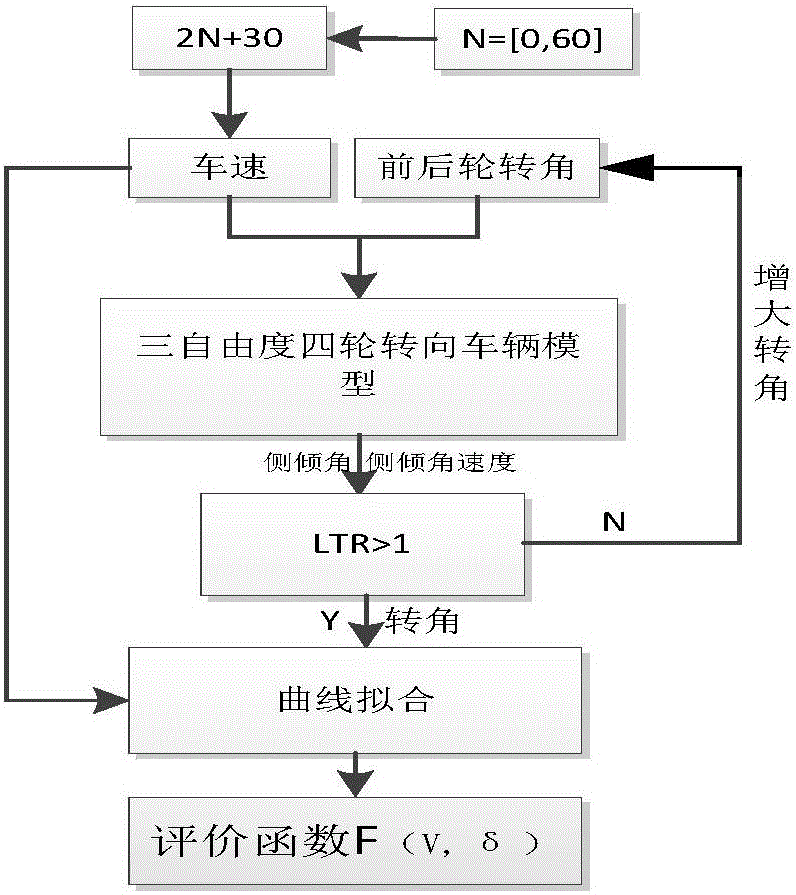
[0112] Such as figure 2 Process shown:
[0113] (1) Set the speed of the vehicle within the range of [30,150]km / h, and sample at an interval of 5-10km / h; where [30,150]km / h is a common interval for car driving, higher or lower than this interval It is meaningless to prevent rollover; too high is uncontrollable, too low is extremely difficult to roll over; the smaller the interval, the higher the accuracy of the fitting curve;
[0114] (2) When the vehicle speed is 30km / h, set the front and rear wheel angles to 0deg. Input these three parameters into the three-degree-of-freedom four-wheel steering rollover model, and obtain the steady-state roll angle velocity and roll angle by solving the differential equation;
[0115] (3) Calculate the LTR value at this time from the roll angle and roll angular velocity in this state. When the LTR value is less than the range of 0.8--1, increase the front and rear wheel angles and jump to step (2), until the LTR reaches the preset value;...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



