

Tactile sensor based on elastomer three-dimensional deformation and detection method
A tactile sensor, three-dimensional deformation technology, applied in the measurement of the elastic deformation force of the measurement gauge, etc., can solve the problems of low detection accuracy, complex circuit, wiring, and manufacturing difficulties
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
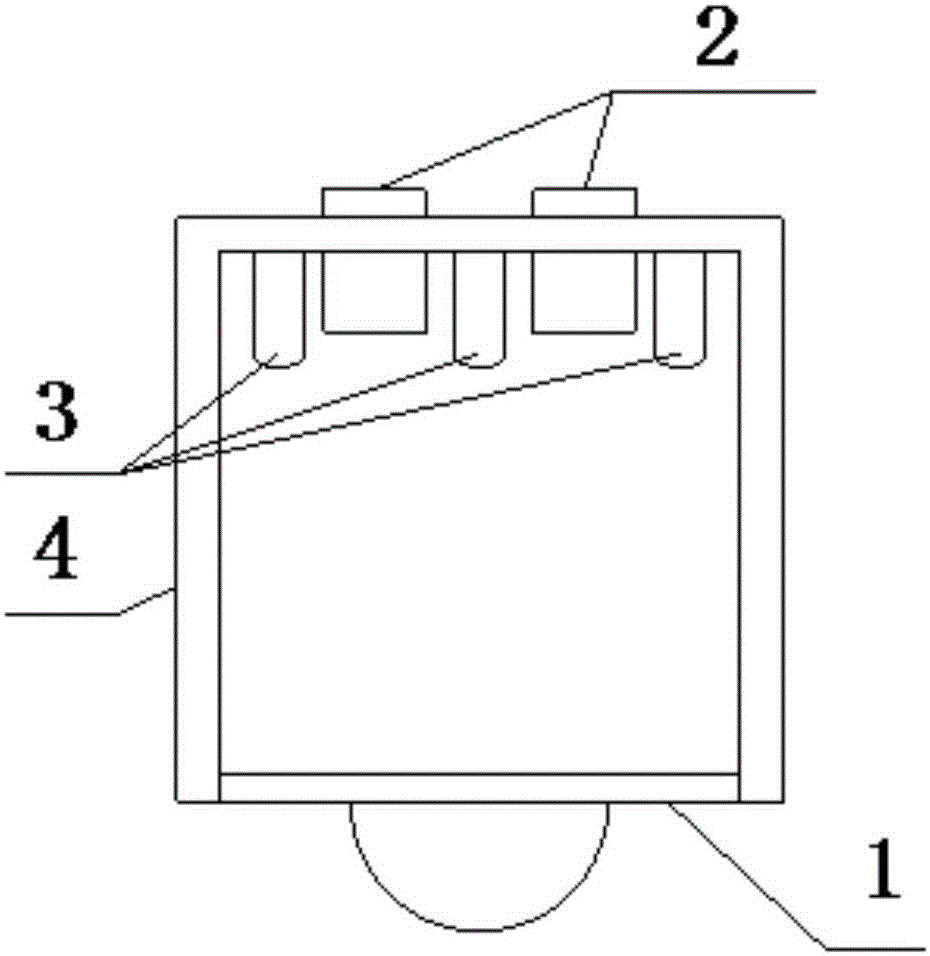
[0059] Embodiment: a kind of tactile sensor based on elastic body three-dimensional deformation, its structure is as follows figure 1 and figure 2As shown, it includes a sensor bracket 4, a binocular camera 2 is arranged on the sensor bracket 4, a plurality of illumination light sources 3 are installed around the binocular camera 2, and an elastic body 1 is located below the binocular camera 2.
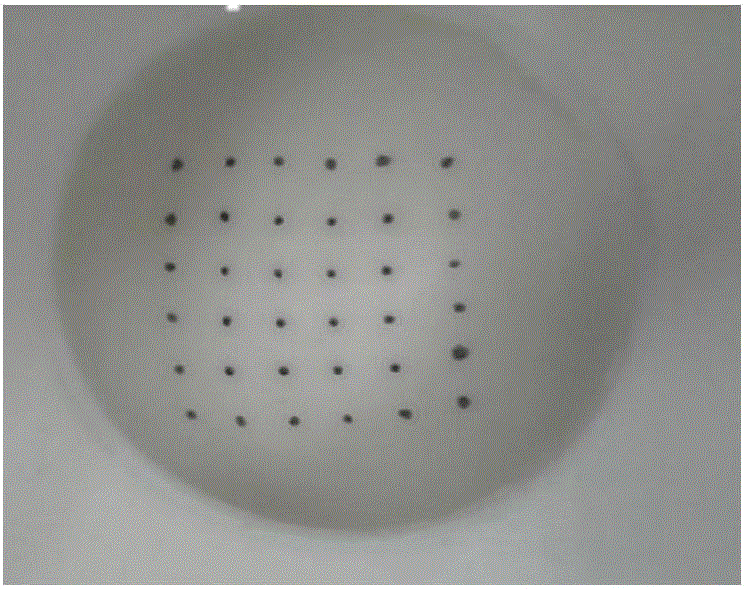
[0060] The elastic body 1 is a hollow hemispherical structure, the outer diameter of the hemispherical structure is 35mm, and the wall thickness is 3mm; the material of the elastic body is silicone rubber, model NE-7130, and the hardness is 30HA; the inner wall of the elastic body is made 6X6 by laser Marking point, diameter 1mm, spacing 5mm, the actual structure of the marking point is as follows image 3 shown.
[0061] The sensor bracket 4 is integrated with the edges around the hemisphere of the elastic body 1, and has a good fixing effect. The binocular camera 2 is arranged s...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Wall thickness | aaaaa | aaaaa |
| Diameter | aaaaa | aaaaa |
| Diameter | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More