

Multi-connecting-rod hang system for wheeled movable robot
A mobile robot, suspension system technology, applied in suspension, elastic suspension, transportation and packaging, etc., can solve the problems of unable to meet the requirements of wheeled mobile robots, affect the movement performance of the robot, aggravate the wear of the driving wheel, etc. Reliability and stability, increase the life of the robot, reduce the effect of driving wheel wear
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further explained below in conjunction with the drawings.
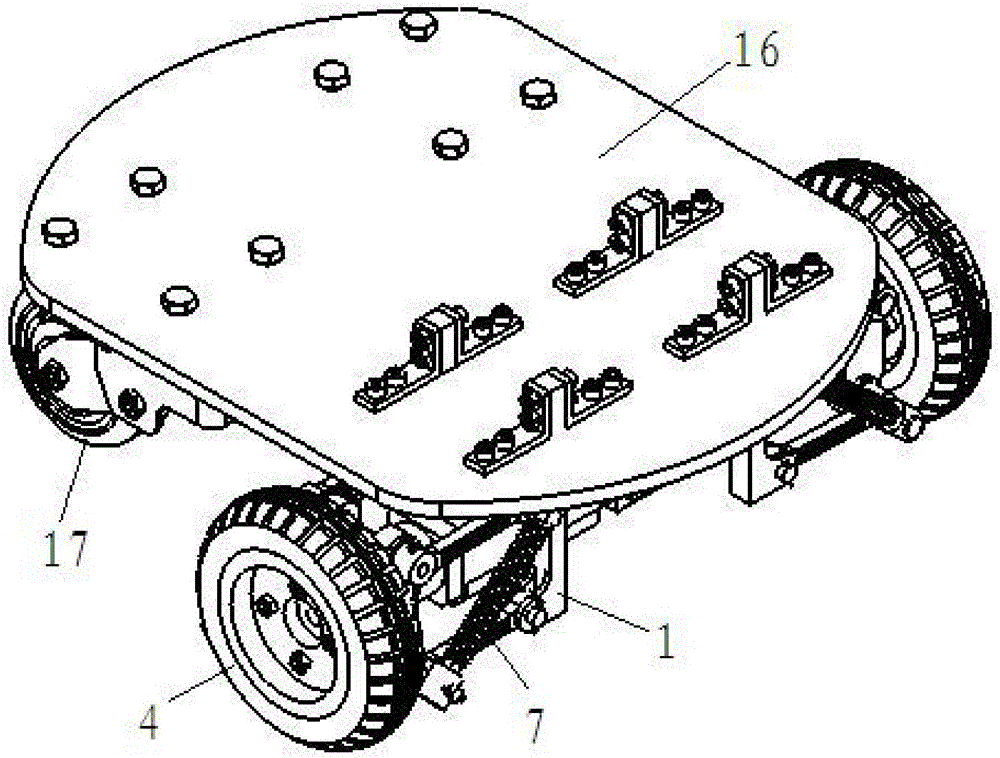
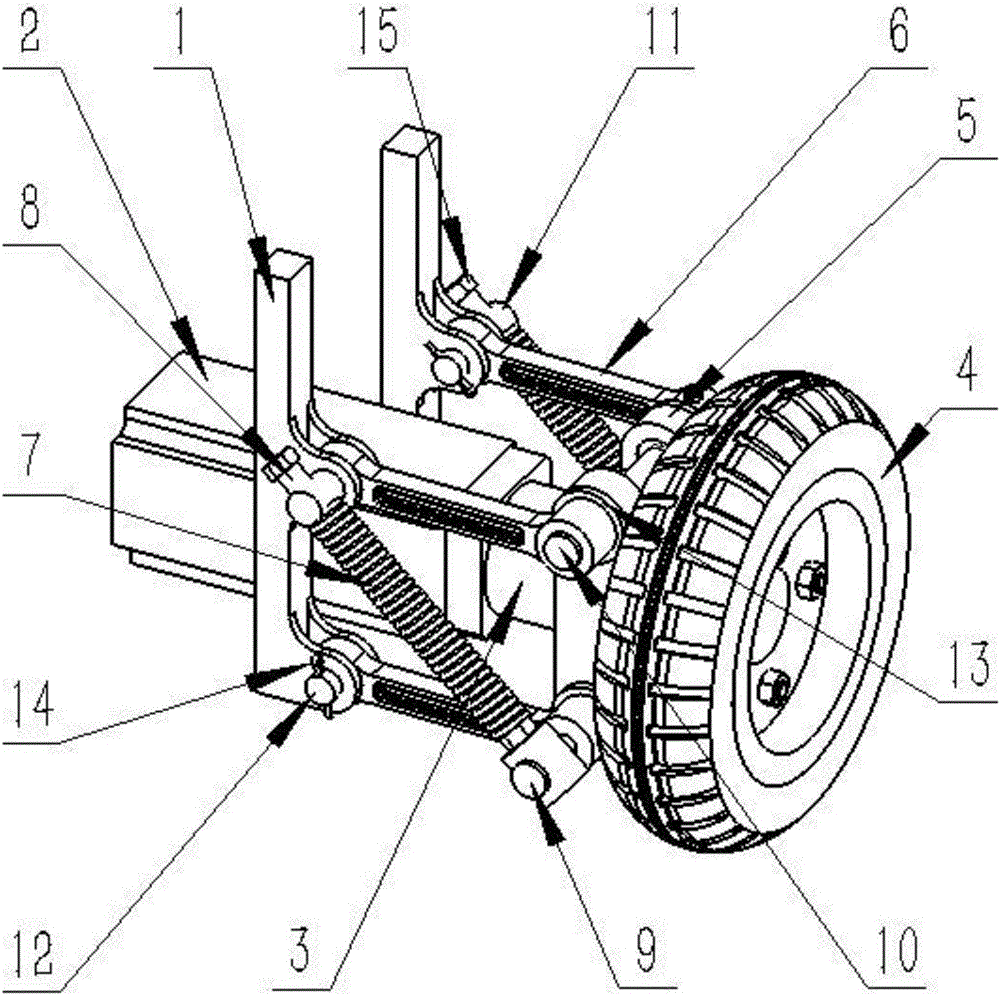
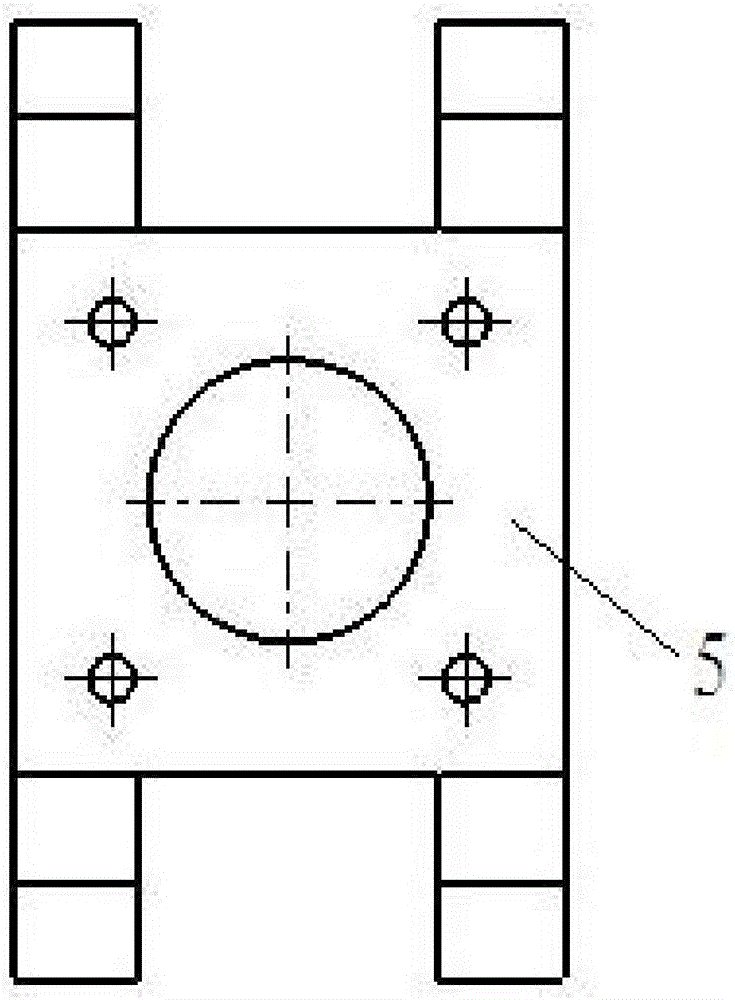
[0027] Such as Figure 1~Figure 4 As shown, a multi-link suspension system for a wheeled mobile robot includes a suspension fixing bracket 1, a drive wheel assembly and two symmetrically distributed parallelogram link swing mechanisms. The drive wheel assembly passes through a reducer bracket 5. It is connected with the parallelogram connecting rod swing mechanism and can swing up and down with the connecting rod swing mechanism. Reducer bracket 5—connecting rod 6—suspension fixing bracket 1—connecting rod 6, forming a parallelogram mechanism. When the parallelogram connecting rod swing mechanism swings, the diagonal distance changes, thereby compressing the spring 7 to achieve the drive wheel 4 always on the ground And the purpose of shock absorption. Furthermore, according to the nature of the parallelogram, it can be seen that when the drive wheel 4 swings up and down with the li...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More