

Indoor fusion positioning method based on multi-features
A positioning method and internal fusion technology, applied in positioning, measuring devices, instruments, etc., can solve the problems of inability to provide, difficult to take into account cost and accuracy, high positioning accuracy and stability, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
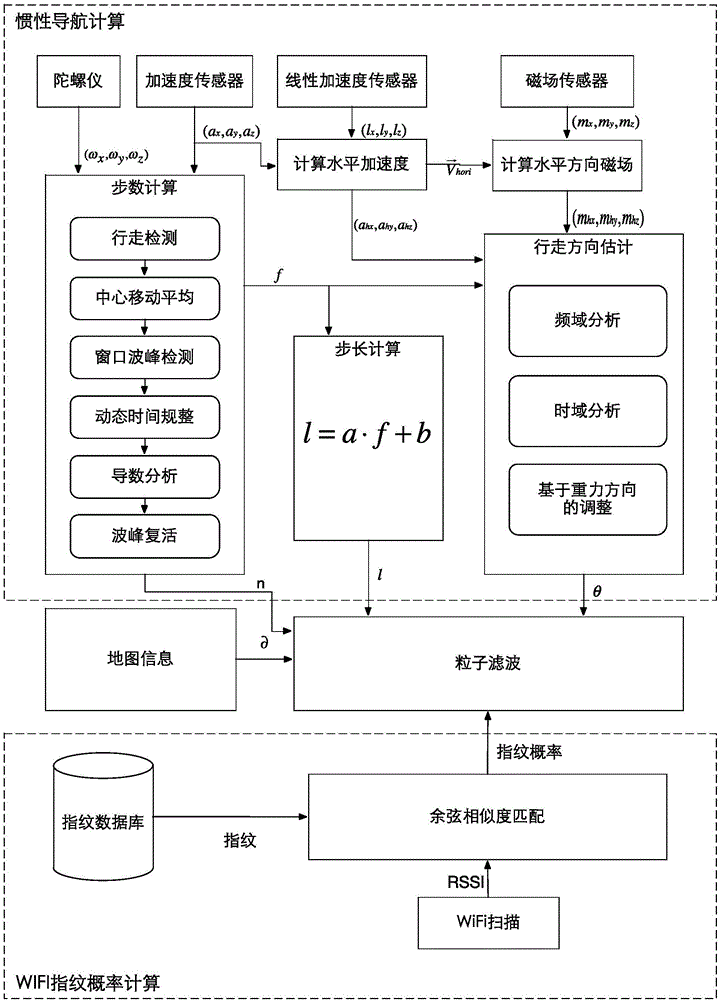
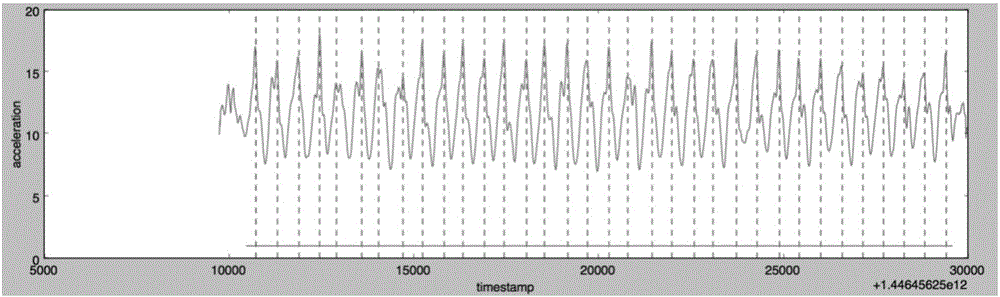
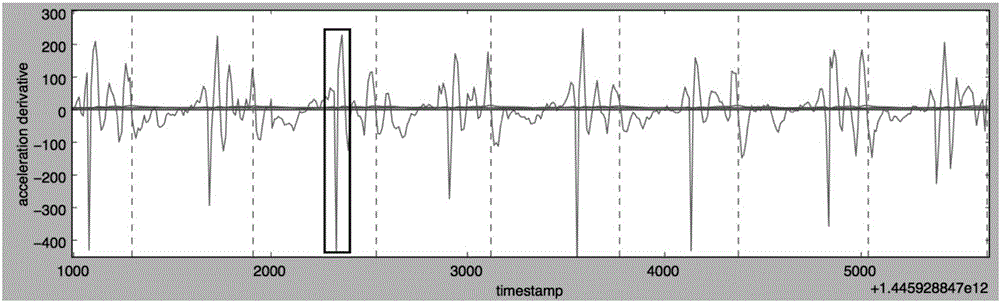
[0020] Such as figure 1 As shown, the multi-feature-based indoor fusion positioning method is divided into three major parts, namely Wi-Fi fingerprint probability calculation, inertial navigation calculation and particle filter fusion. The Wi-Fi fingerprint probability calculation uses the cosine similarity matching algorithm. The inertial navigation calculation is divided into three parts: step count calculation, step length calculation and walking direction estimation. The steps are calculated using the methods of walking detection, angular velocity filtering, center moving average, window peak detection, dynamic time warping, derivative analysis filtering and peak resurrection. The step length calculation uses the relationship model between step length and step frequency. The time-domain and frequency-domain analysis of the horizontal acceleration and the adjustment strategy based on the direction of gravity are given. Finally, in the particle filter fusion part, based on...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More