

Method for jointly estimating vehicle mass-road gradient under consideration of influence of braking and turning
A technology for road gradient and joint estimation, applied in the directions of calculation, design optimization/simulation, instrumentation, etc., can solve the problem of reducing vehicle quality and road gradient estimation accuracy, not considering the influence of braking and turning parameter estimation, and road increasing the complexity of the estimation process And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0078] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, so that those skilled in the art can better understand the present invention and implement it, but the examples given are not intended to limit the present invention.
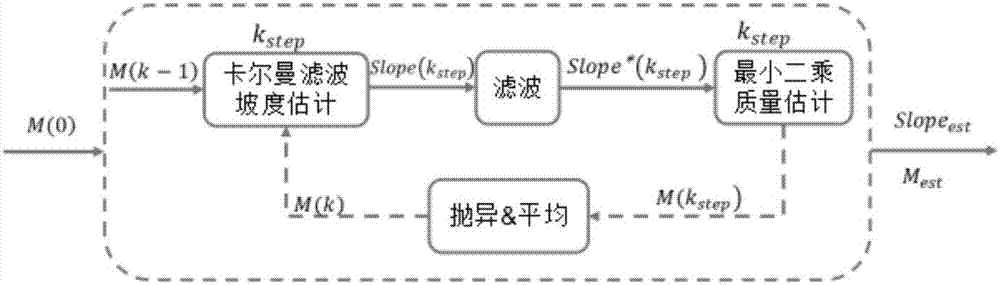
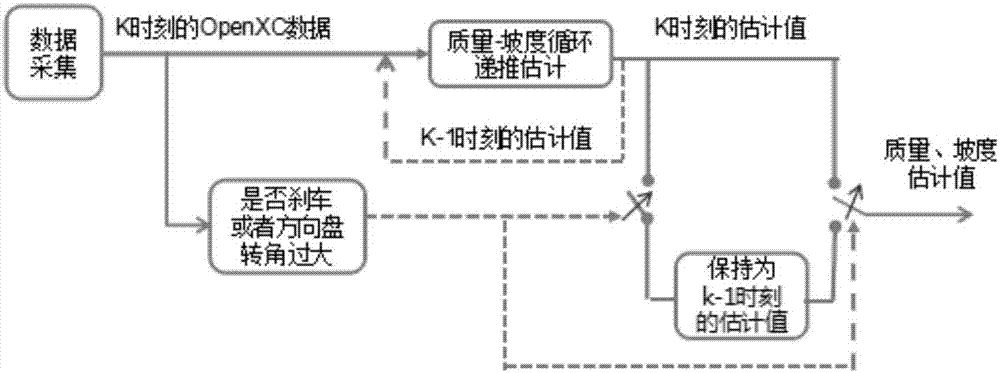
[0079] In this embodiment, the car mass-road gradient joint estimation method considering braking and turning effects includes the following steps:
[0080] Step 1: Collect data
[0081] Step 11: Use the data acquisition device to obtain vehicle driving status data
[0082] Such as figure 1 As shown, this embodiment adopts the OpenXC provided by Ford Motor Company of the United States to insert into the OBD-II interface, and then develops an APP based on data collection software to receive real-time vehicle driving status data through the Bluetooth device and store it in the mobile terminal of the mobile phone. Specifically, the vehicle driving State data includes torque T, vehi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More