

Dancing robot indoor pedestrian tracing method based on laser radar
A dancing robot and laser radar technology, applied in the field of robotics, can solve the problem that the pedestrian tracking method is difficult to meet short-distance pedestrian tracking and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] It should be noted that, in the case of no conflict, the embodiments of the present invention and the features in the embodiments can be combined with each other.
[0066] The present invention will be described in detail below in conjunction with embodiments and accompanying drawings.
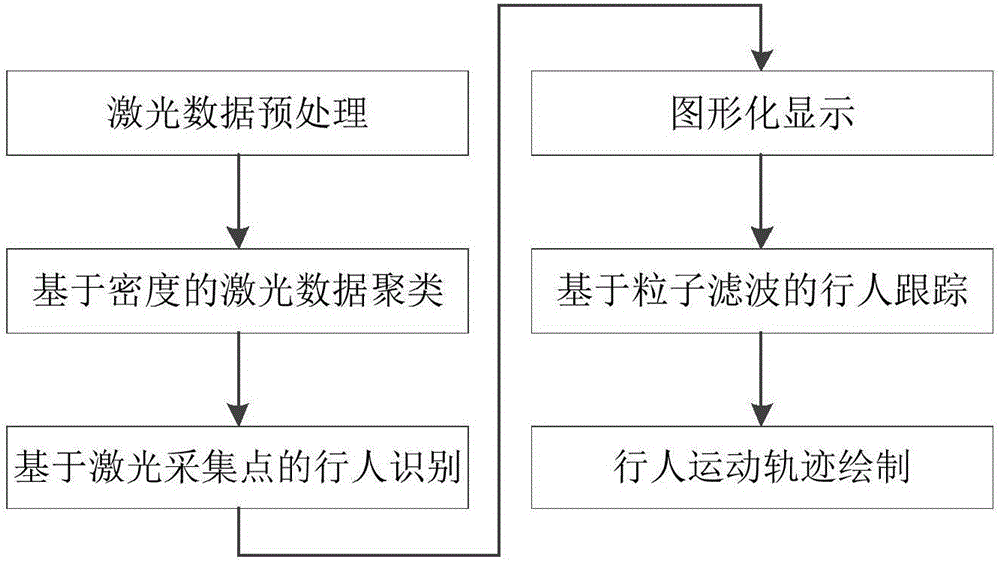
[0067] The invention installs the laser radar on the waist of the dancing robot, obtains the scanned distance data, and performs preprocessing and cluster analysis on the data, realizes pedestrian identification through the analysis of the clusters, graphically displays the laser data, and uses the particle filter algorithm Realize pedestrian tracking; figure 1 It is a flow chart of the indoor pedestrian tracking method of a dancing robot based on lidar in the present invention, and the method includes the following steps:
[0068] The first step, laser data preprocessing:
[0069] Place the laser radar at the waist of the dancing robot, 1m above the ground, select the URG laser radar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More