

Propulsion and pose adjusting device for continuous robot and adjusting method
A technology for adjusting devices and robots, which is applied in the direction of manipulators, program-controlled manipulators, and manufacturing tools. It can solve the problems of destroying the body structure of continuous robots, not having active bending, and damage to blood vessels and organs, so as to expand the application range and avoid positional interference. and collision, improve the effect of passability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with accompanying drawing:
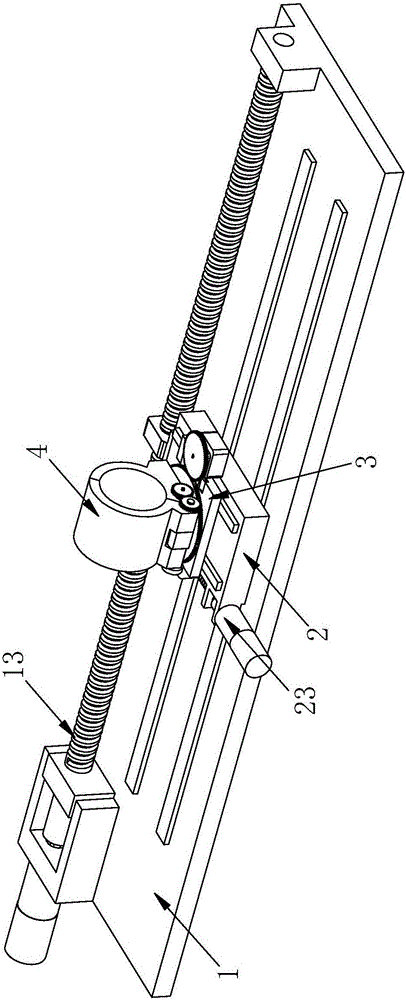
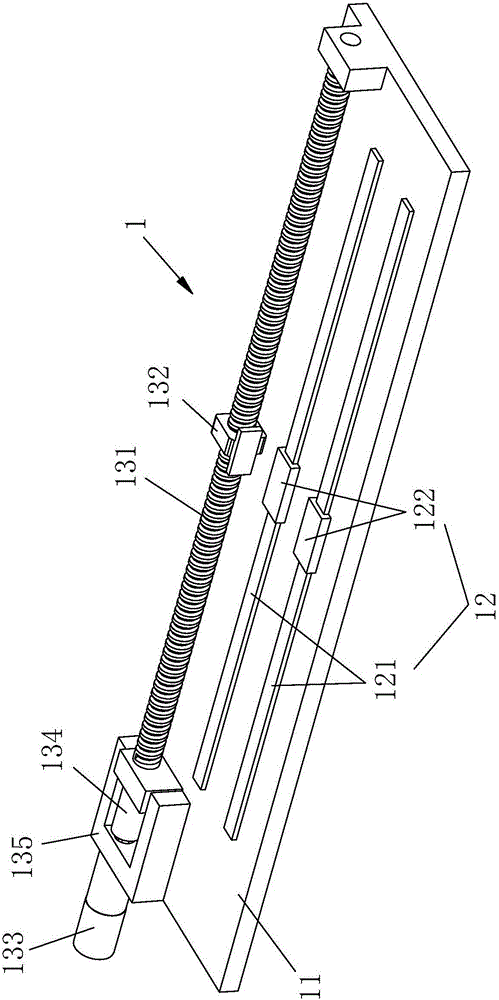
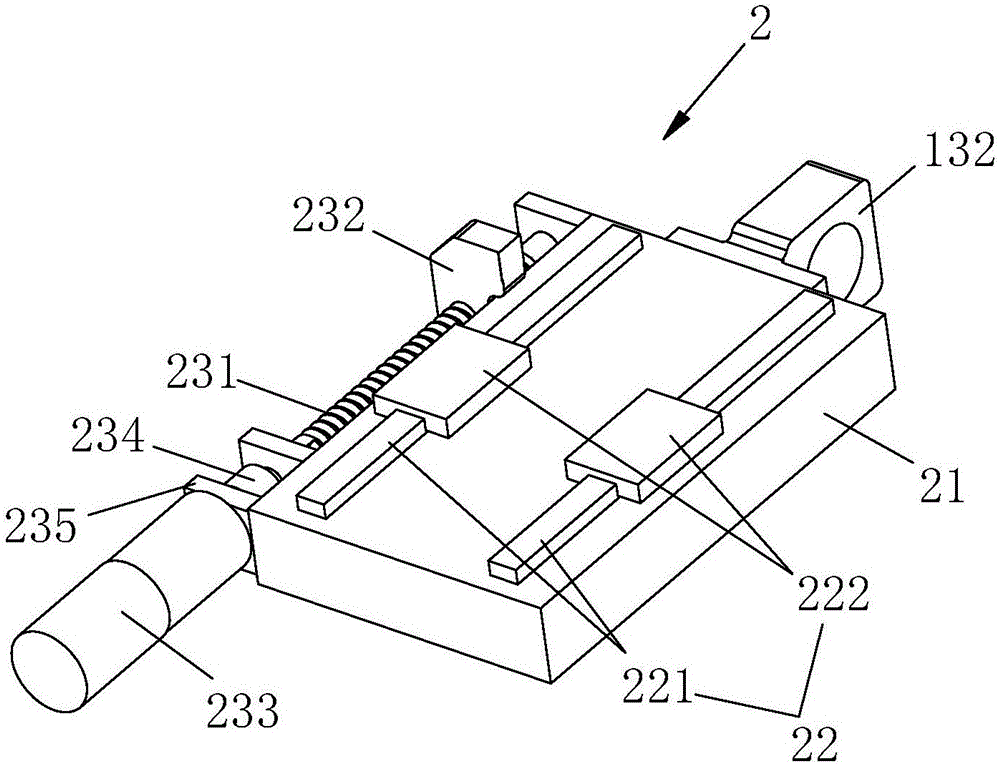
[0033] Such as figure 1 A kind of adjustment device for continuous robot propulsion and pose shown, including linear propulsion part 1, linear adjustment part 2 arranged on linear propulsion part 1, rotation adjustment part 3 arranged on linear adjustment part 2 and The clamping part 4 arranged on the rotation adjustment part 3, the linear propulsion part 1 is fixed on the external environment by bolts, and plays the role of direct contact with the outside world and supporting other parts; the linear propulsion part 1 drives the continuous robot 100 to the curved passage 200 makes a linear motion forward or backward, the linear adjustment part 2 drives the continuous robot 100 to perform a linear motion of up and down translation relative to the curved channel 200, and the rotating part 3 drives the continuous robot 100 to perform a rotary motion relative to the curved chan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More