

An intelligent docking robot for drone landing
A technology for robots and drones, applied in the field of drones, can solve the problems of shock damage, no anti-collision locking facilities, etc., and achieve the effects of reducing shock force, large bearing capacity, and high stiffness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
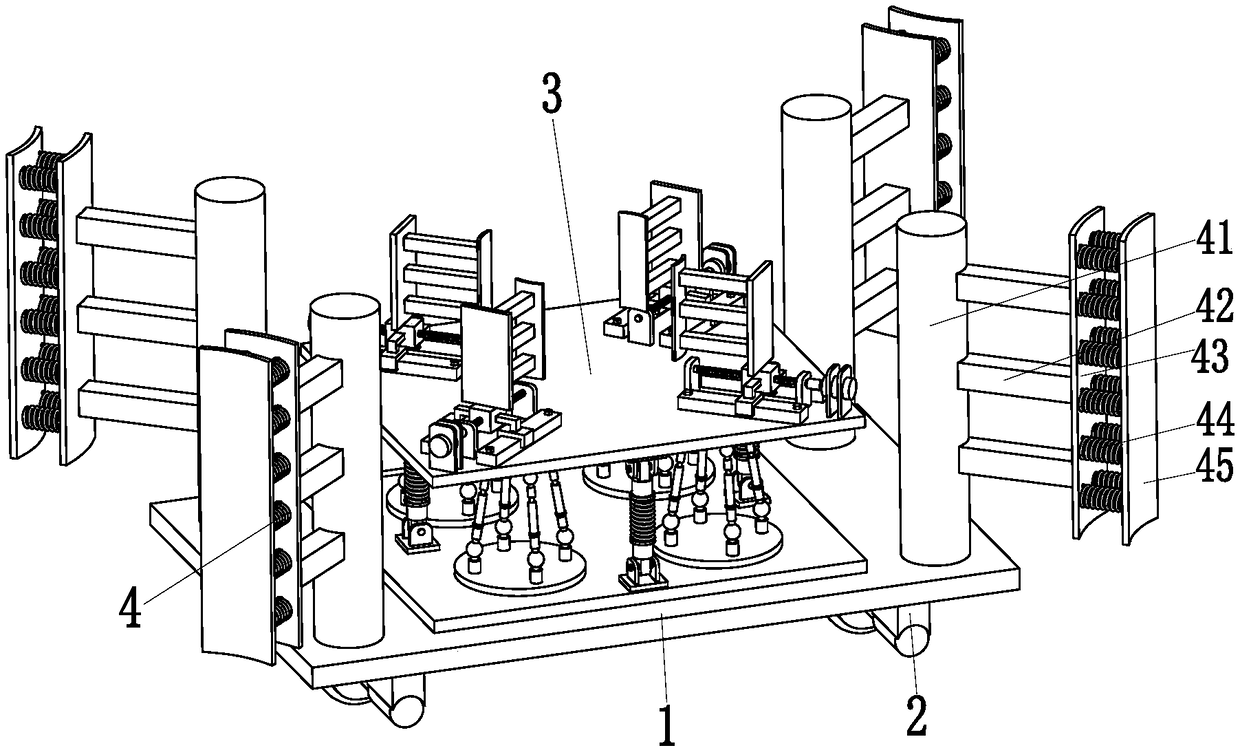
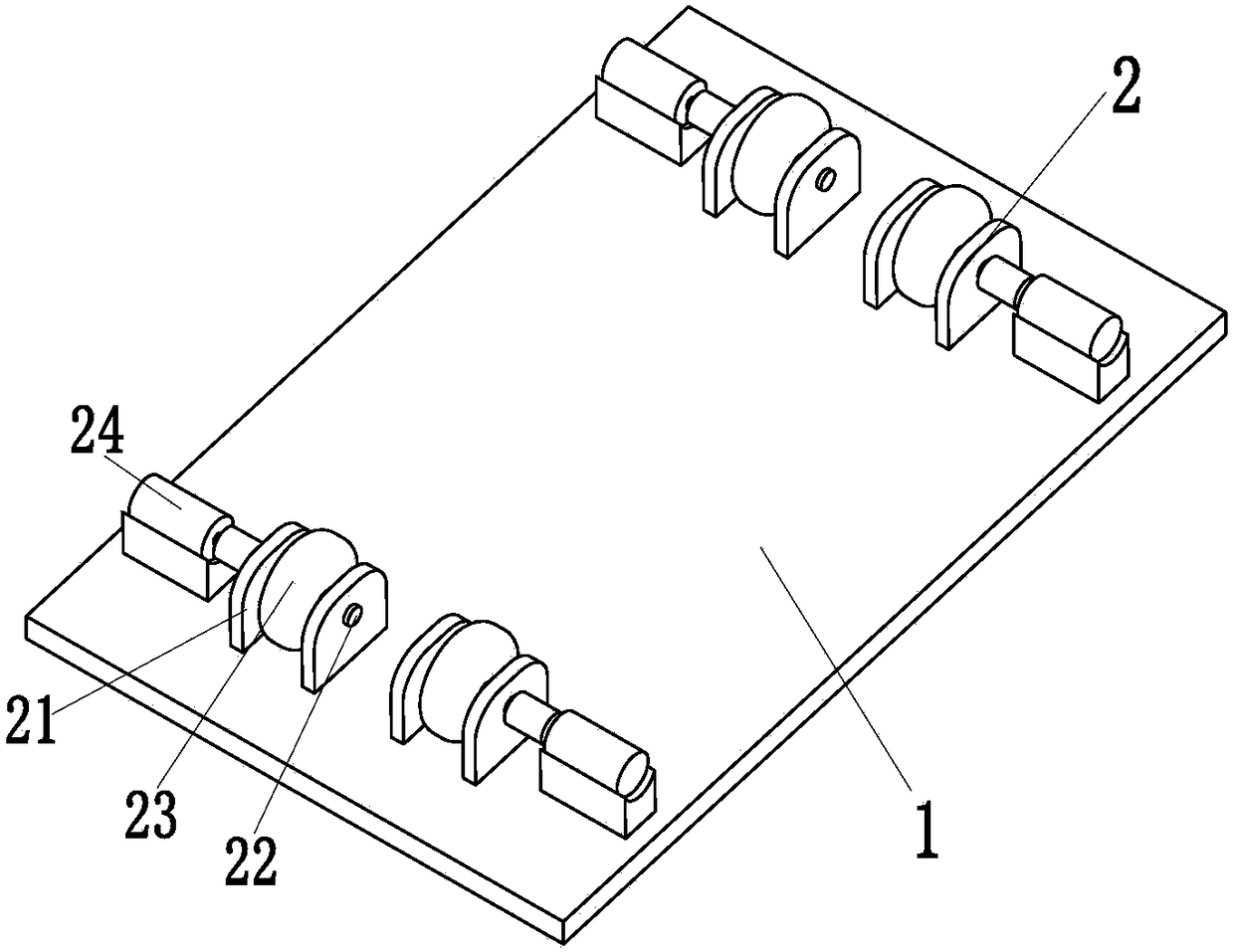
[0024] Such as Figure 1 to Figure 5As shown, an intelligent docking robot for unmanned aerial vehicle landing includes a bottom plate 1, and four walking branch chains 2 are symmetrically arranged on the lower end surface of the bottom plate 1, and the four walking branch chains 2 can control the bottom plate 1 to walk freely. , and the direction is controllable; the walking branch chain 2 includes two installation ears 21 symmetrically arranged on the lower end surface of the bottom plate 1, and a rotation shaft 22 is installed between the two installation ears 21 through a bearing, and the middle part of the rotation shaft 22 is installed through a key There are traveling wheels 23, and the end of the rotating shaft 22 close to the side wall ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More