Self-training method and system
A training mode and training parameter technology, applied in the field of autonomous training, can solve the problems of limited training effect and poor repeatability, and achieve the effects of increasing fun, simple operation, and improving subjective initiative
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
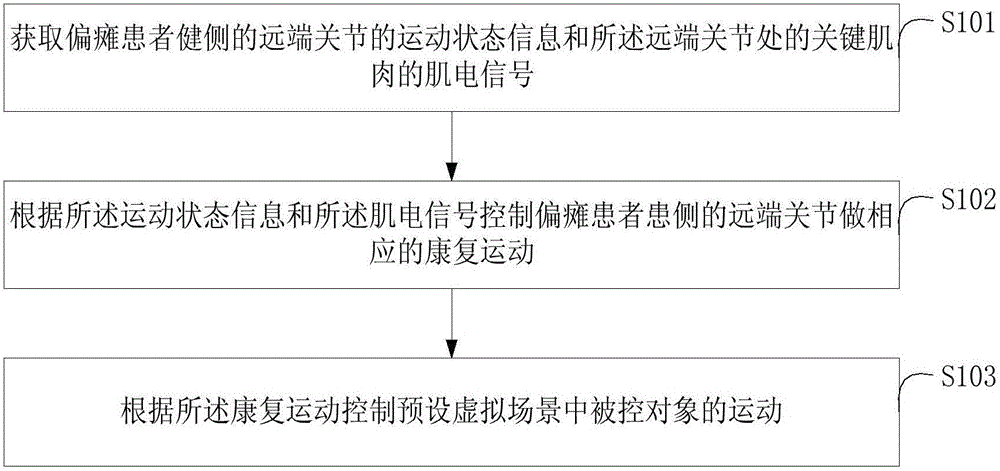
[0047] Reference figure 1 , figure 1 It is a method flowchart of the first embodiment of an autonomous training method of the present invention.
[0048] In the first embodiment, the autonomous training method includes:
[0049] S101: Obtain the motion state information of the distal joint of the contralateral side of the hemiplegic patient and the electromyographic signal of the key muscle at the distal joint;
[0050] One side of a hemiplegic patient is healthy and can move freely, which is called the healthy side, and the other side is unable to move the limbs due to factors such as stroke, which is called the affected side. For patients with hemiplegia, the rehabilitation of distal joints such as wrist joints, finger joints and ankle joints is of great significance to the overall rehabilitation of hemiplegic patients. At the same time, the active participation of patients has significantly improved the rehabilitation effect of hemiplegic patients.
[0051] S102, controlling the di...
Embodiment 2
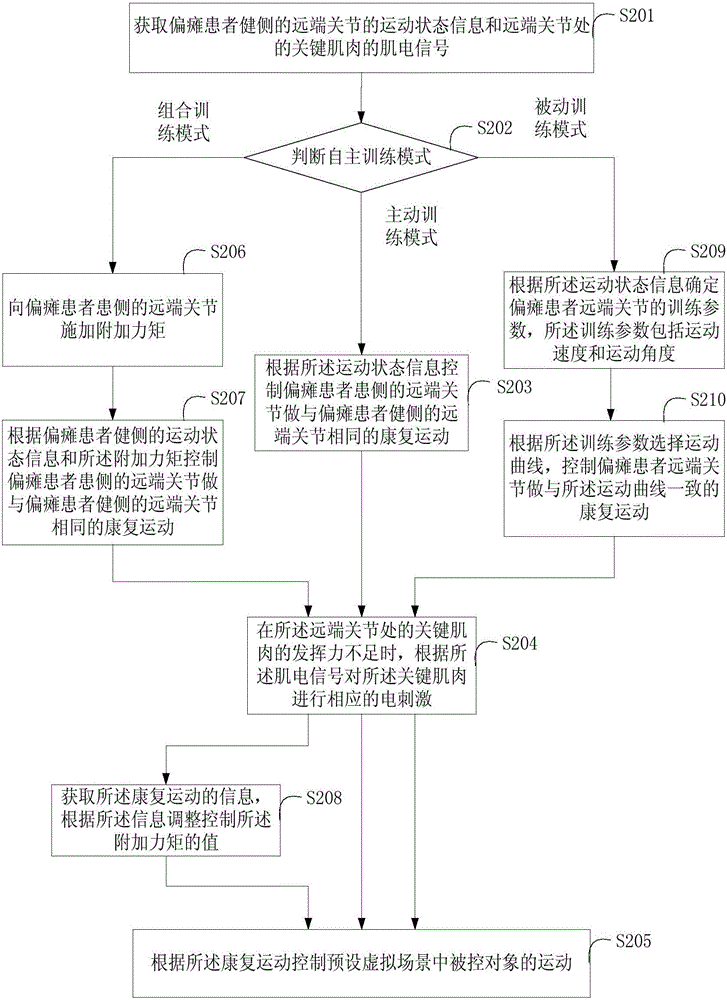
[0067] Reference figure 2 , figure 2 It is a method flowchart of the second embodiment of an autonomous training method of the present invention.
[0068] In the second embodiment, the autonomous training method includes:
[0069] S201: Obtain the motion state information of the distal joint on the contralateral side of the hemiplegic patient and the electromyographic signals of the key muscles at the distal joint;
[0070] S202: Determine the autonomous training mode, if the autonomous training mode is the active training mode, go to step S203; if the autonomous training mode is the combined training mode, go to step S206; if the autonomous training mode is the passive training mode, go to step S209.
[0071] S203: Control the distal joint of the affected side of the hemiplegic patient to perform the same rehabilitation exercise as the distal joint of the healthy side of the hemiplegic patient according to the motion state information;
[0072] S204, when the key muscles at the dist...
Embodiment 3
[0090] Reference image 3 , image 3 It is a structural block diagram of the first embodiment of an autonomous training system of the present invention.
[0091] In the third embodiment, the autonomous training system includes:
[0092] The motion detection device 01 is used to obtain the motion state information of the distal joint of the healthy side of the hemiplegic patient;
[0093] The motion detection device includes a data glove for detecting the motion state of the uninvolved wrist and finger joints of a hemiplegic patient, and a motion detection device for detecting the motion state of the ankle joint. The motion state includes the motion angular velocity of the uninhibited wrist joint, finger joint and ankle joint of the hemiplegic patient , Movement speed, maximum movement angle and maximum movement speed.
[0094] Muscle electricity detection device EMG02, used to obtain the EMG signal of key muscles at the distal joints;
[0095] The autonomous training module 03 is used ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More