Cantilever joint clamping manipulator
A manipulator and clamping technology, which is applied in the field of manipulators, can solve problems such as low clamping efficiency, poor clamping stability, and large size, and achieve the effects of high stability and flexibility, increasing the radius of the working range, and enhancing safety performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] Below in conjunction with accompanying drawing, the present invention will be further described with specific embodiment,
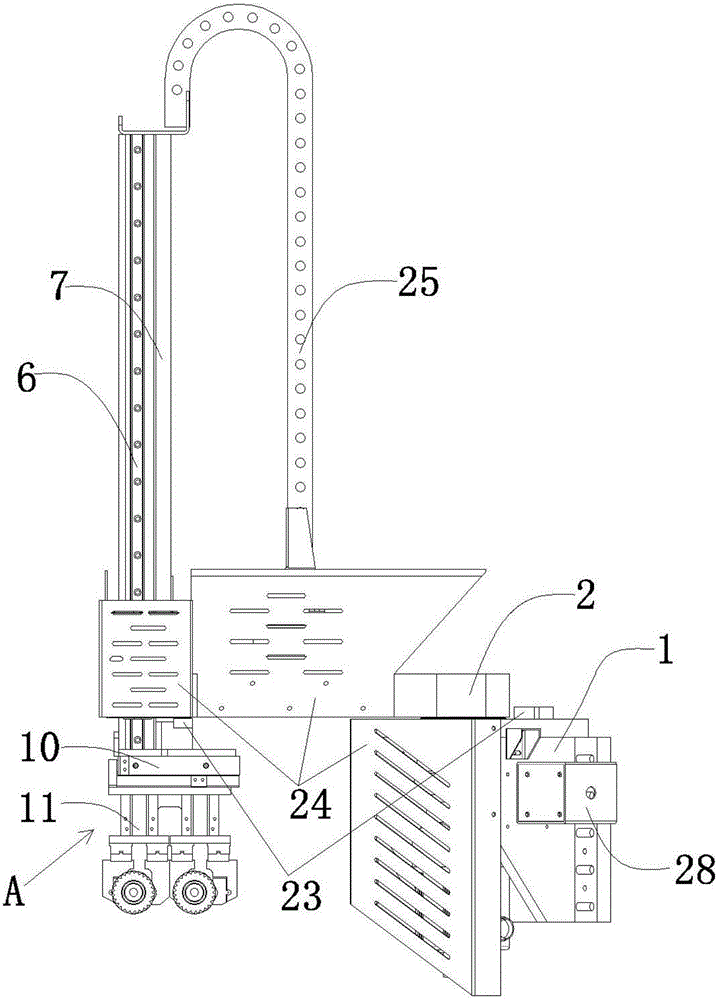
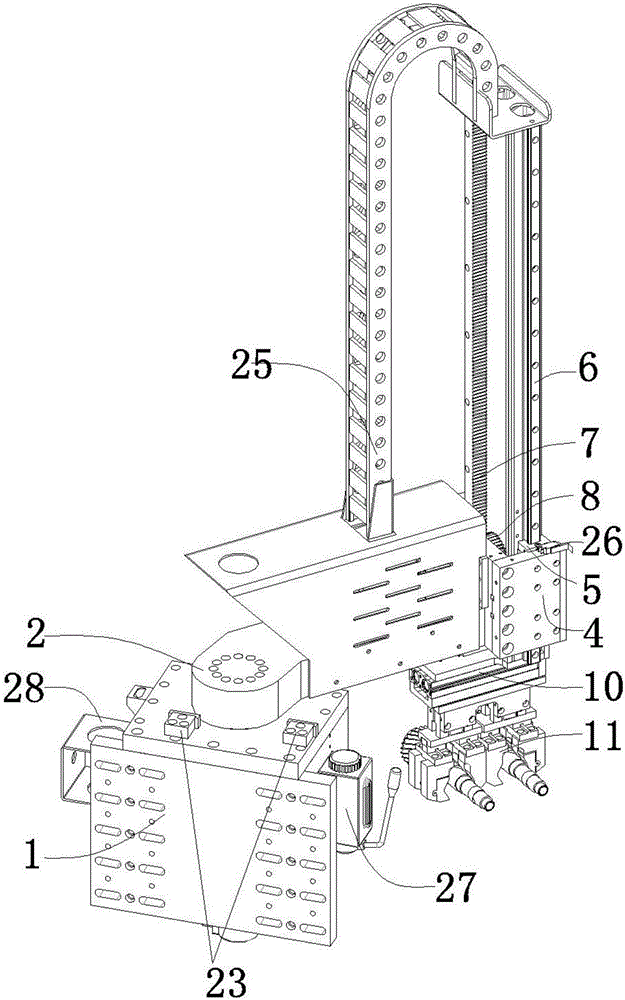
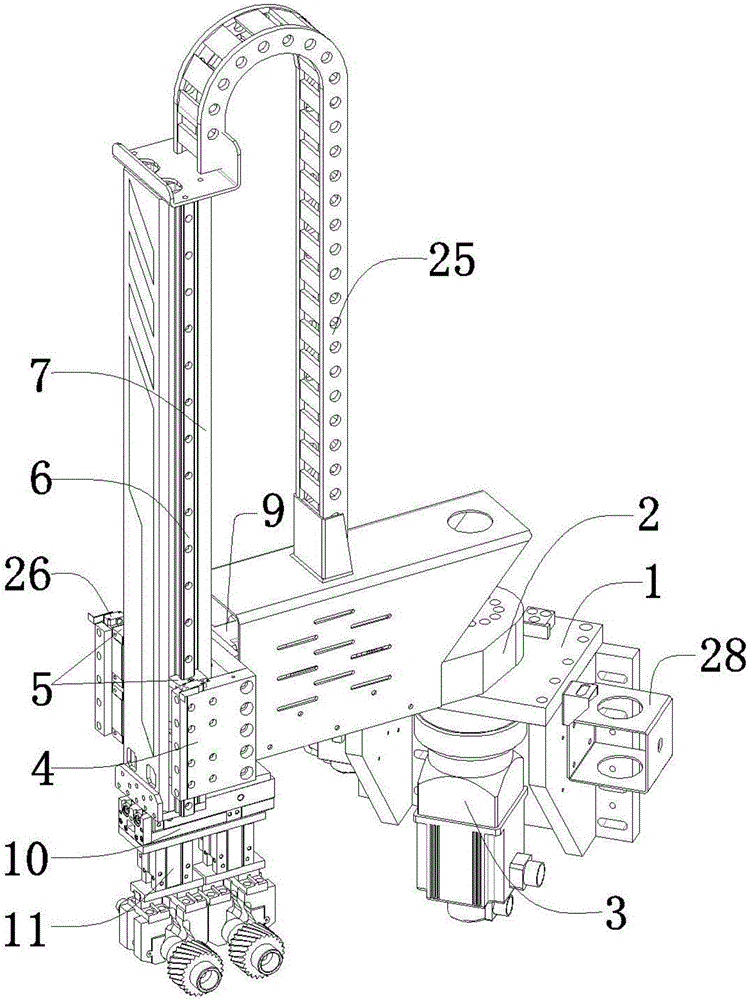
[0028] Such as Figure 1-Figure 3 As shown, a cantilever joint clamping manipulator includes a fixed plate base 1 installed on a gear rubbing machine, a rotating arm 2 is rotatably connected above the fixed plate base 1, and a device for driving the rotating arm 2 to rotate is arranged under the fixed plate base 1. The driving device 3; the left end of the rotating arm 2 is connected with a slider fixing seat 4, and the inner wall of the two sides of the slider fixing seat 4 is provided with a fixed slider 5, and a linear guide rail 6 matching it is installed on the fixed slider 5 , a rack 7 is vertically arranged on the side wall of the linear guide rail 6, a gear 8 meshing with the rack 7 is arranged on the inner wall of the side plate of the slider holder 4, and a servo motor 9 on one side of the slider holder 4 The gear 8 is driven to rotate; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More