

Hexapod robot driven by parallel connecting rods
A hexapod robot and connecting rod drive technology, applied in the field of robotics, can solve the problems of reducing motion performance and motor shaft wear, and achieve the effect of improving the shape of the legs, increasing the carrying capacity, and increasing flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] Preferred embodiments of the present invention are described in detail as follows in conjunction with accompanying drawings:
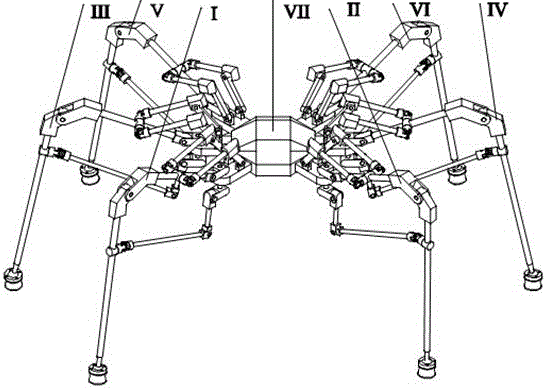
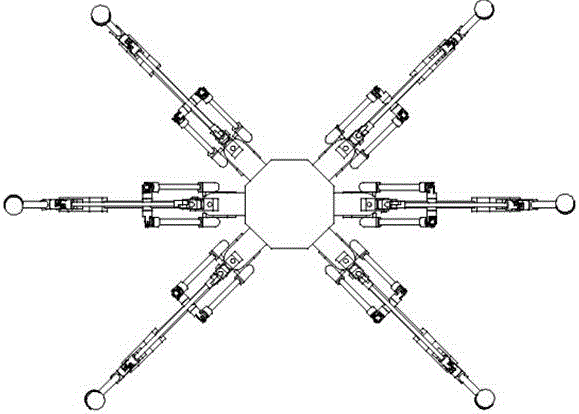
[0022] see figure 1 and figure 2 , a hexapod robot driven by parallel links, mainly composed of body and six sets of mechanical legs, the body It is an octahedron-like structure, the structure of the six sets of mechanical legs is exactly the same, and the six sets of mechanical legs are installed on the body symmetrically six of the faces.
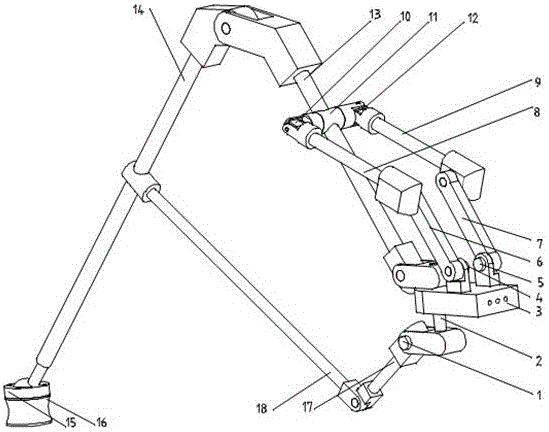
[0023] like image 3 As shown, the mechanical leg includes a lower steering gear 1, a deflection shaft 2, a connecting rod seat 3, an inner steering gear 4, an outer steering gear 5, a leg inner swing rod 6, a leg outer swing rod 7, and a leg inner pull rod 8. External leg rod 9, inner single universal hinge 10, cylindrical slider 11, outer single universal hinge 12, thigh 13, calf 14, foot end cover 15, foot 16, lower swing rod 17 and lower support rod 18; The connecting rod seat 3 is fixedly con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More