

Unmanned ship navigation collision avoidance radar detecting method
A detection method and technology for unmanned ships, which are applied in the field of unmanned ship navigation and collision avoidance radar detection, can solve the problems of inability to detect small targets, unable to meet the requirements of unmanned ship navigation and collision avoidance, and weak detection capabilities of navigation radars, and improve the detection ability of navigation radars. The effect of target detection capability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
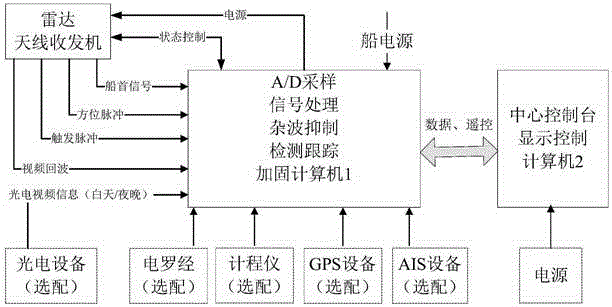
[0025] Such as figure 1 As shown, the embodiment of the present invention provides a radar detection system for unmanned ship navigation and collision avoidance. The whole system is mainly composed of radar, radar antenna, transceiver, servo transceiver unit, and research and development integrated processing unit. The servo transceiver unit includes ≥ 40MHz signal acquisition module, reinforced computer, detection and tracking module, clutter suppression module, R&D integrated processing unit inc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More