

Method for automatically extracting spatial position of rod-shaped ground objects from point clouds in vehicle laser scanning
A vehicle-mounted laser scanning and ground object technology, which is applied in image data processing, instruments, calculations, etc., can solve the problems of the influence of noise points and low adaptability, and achieve the effect of high degree of automation and good extraction effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
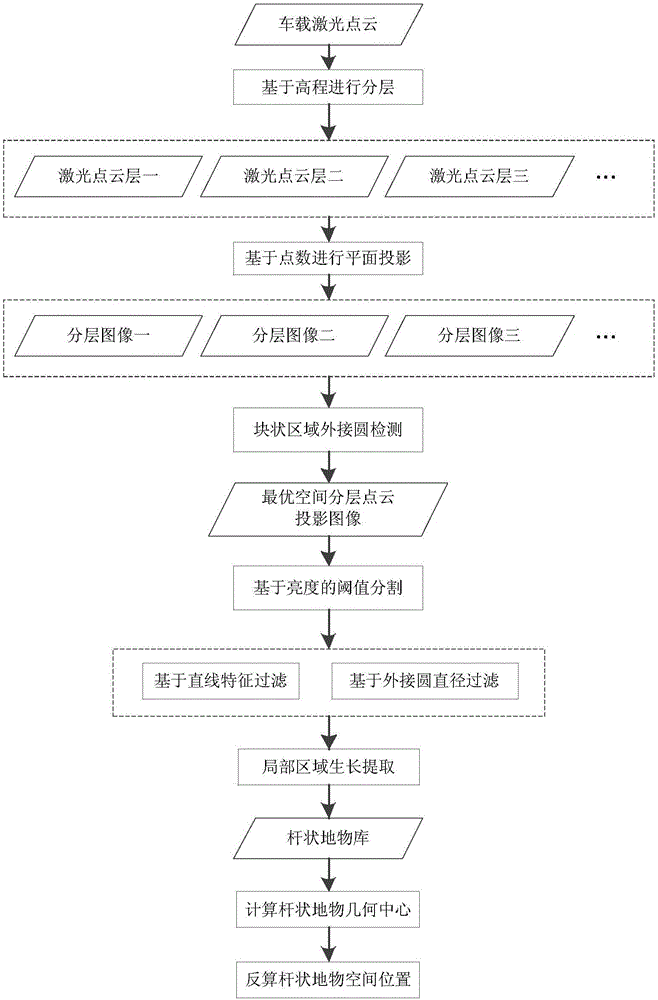
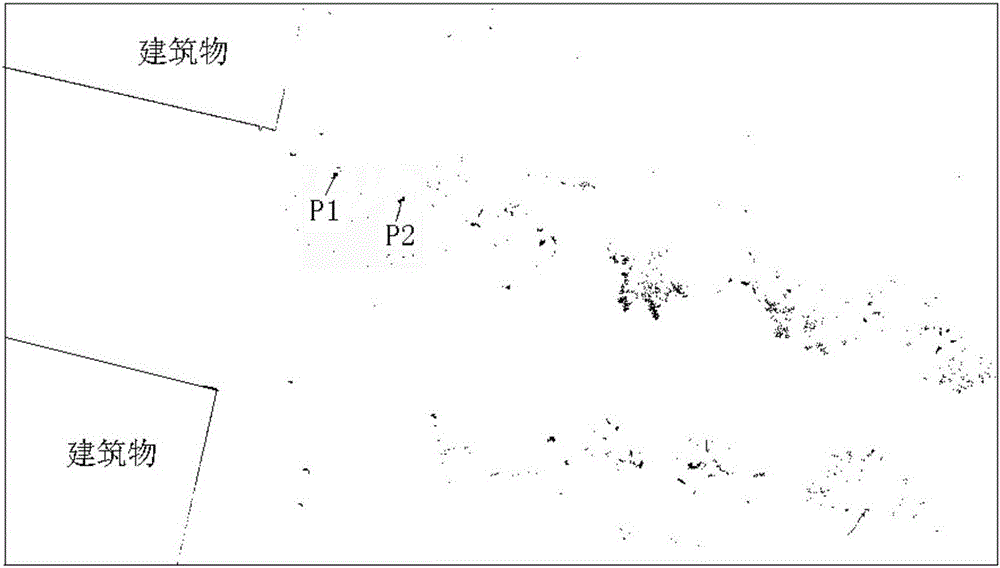
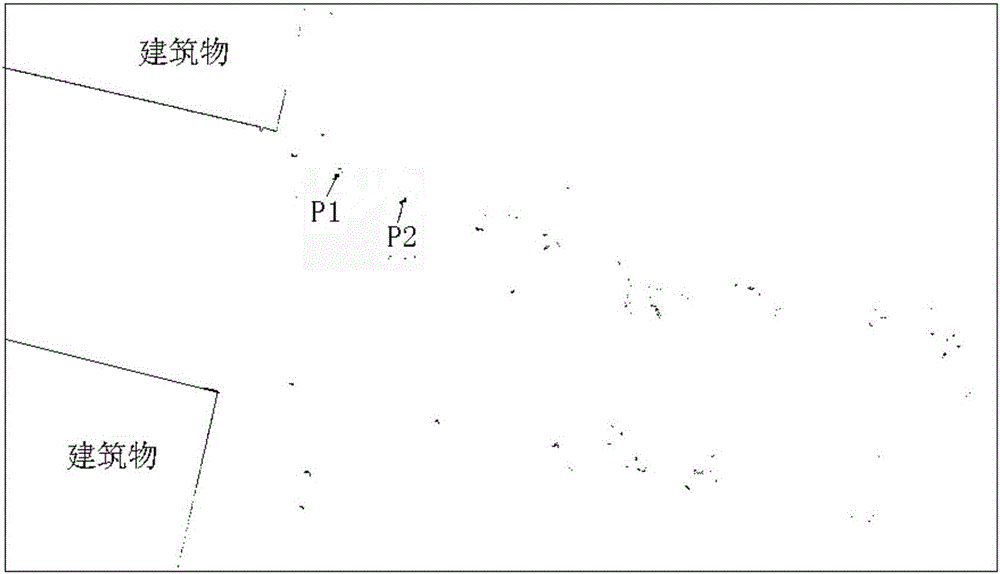
[0019] Those skilled in the art according to the flow chart appended of content of the invention and implementation figure 1 , the present invention can be implemented. For the convenience of implementation, each step in the summary of the invention is described in further detail below, and the Figure 2-Figure 5 The specific example of the example is only the extraction of the coordinate space position of two rod-shaped objects next to the building as an example.
[0020] 1. Detailed description of the first step of the content of the invention:
[0021] 1. Automatic extraction of layered point clouds in vertical space
[0022] According to the actual spatial height distribution of buildings, firstly, the point cloud is layered according to the vertical direction as a whole, and a point cloud layer is divided every 2m to obtain a series of spatially layered point cloud data in the vertical direction within a local range, which is set to l 1 , l 2 , l 3 ...l N ;
[0023...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More