

Six-rotor quick-release unmanned aerial vehicle arm
A technology of six rotors and arms, which is applied in the field of quick dismantling arms of six-rotor UAVs, can solve the problems of low integration of the arms, side deviation of the overall center of gravity, and reduced work efficiency, so as to shorten the production and processing time, reduce the Overall weight, effect of reducing production cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
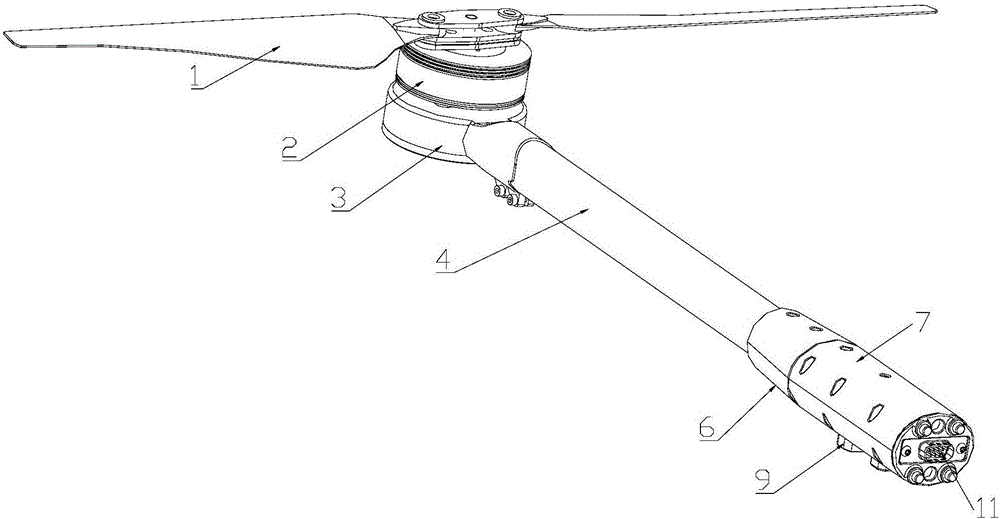
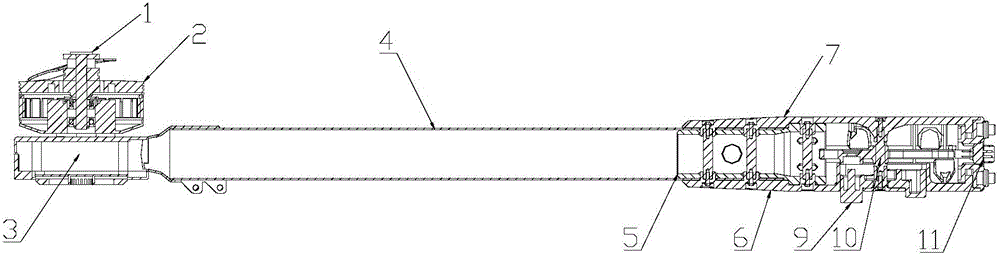
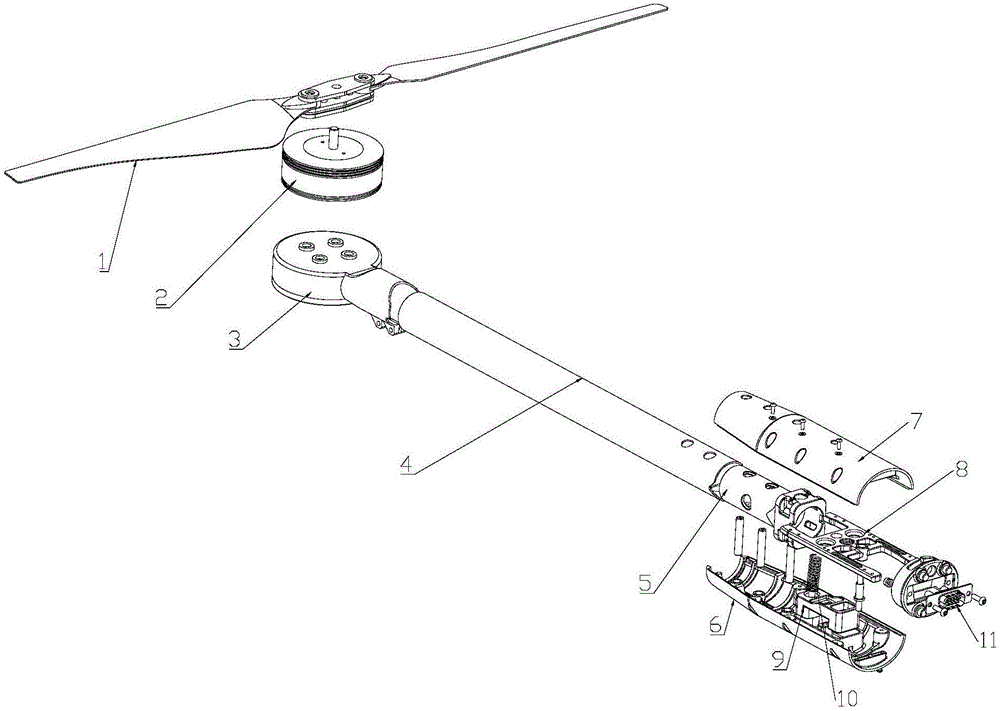
[0030] 1. Install the brushless motor 2 and the electronic speed control module 3 in a fixed position;
[0031] 2. Install with the carbon tube 4 of the paddle arm at the same time, and pass the electric wire of the electronic speed control module 3 through the carbon tube 4 of the paddle arm, and fix the electronic speed control module 3 and the carbon tube 4 of the paddle arm with the hexagon socket head screw M3×10;
[0032] 3. Pass the electronic speed control module 3 wire through the locking block 5 and the plug fixing block, and at the same time assemble the paddle arm carbon tube 4 with the locking block 5, and connect the terminal end of the electronic speed control module 3 wire to the DB9 male -39 The terminals are welded firmly one by one and waterproof;
[0033] 4. Fix the DB9 male head-39 and the plug fixing block through the hexagon socket head screw M3×10 and the non-metallic insert hexagonal locking thin nut M3;
[0034] 5. Install the fixing stud and the fix...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More