

Robot obstacle avoidance method based on depth sensor
A technology of depth sensor and robot, which is applied in the direction of instruments, measuring devices, surveying and navigation, etc., can solve the problems of expensive equipment, difficult path planning, and inability to detect the shape of obstacles, and achieve high accuracy, convenient path planning, and improved avoidance. effect of impediment to rationality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
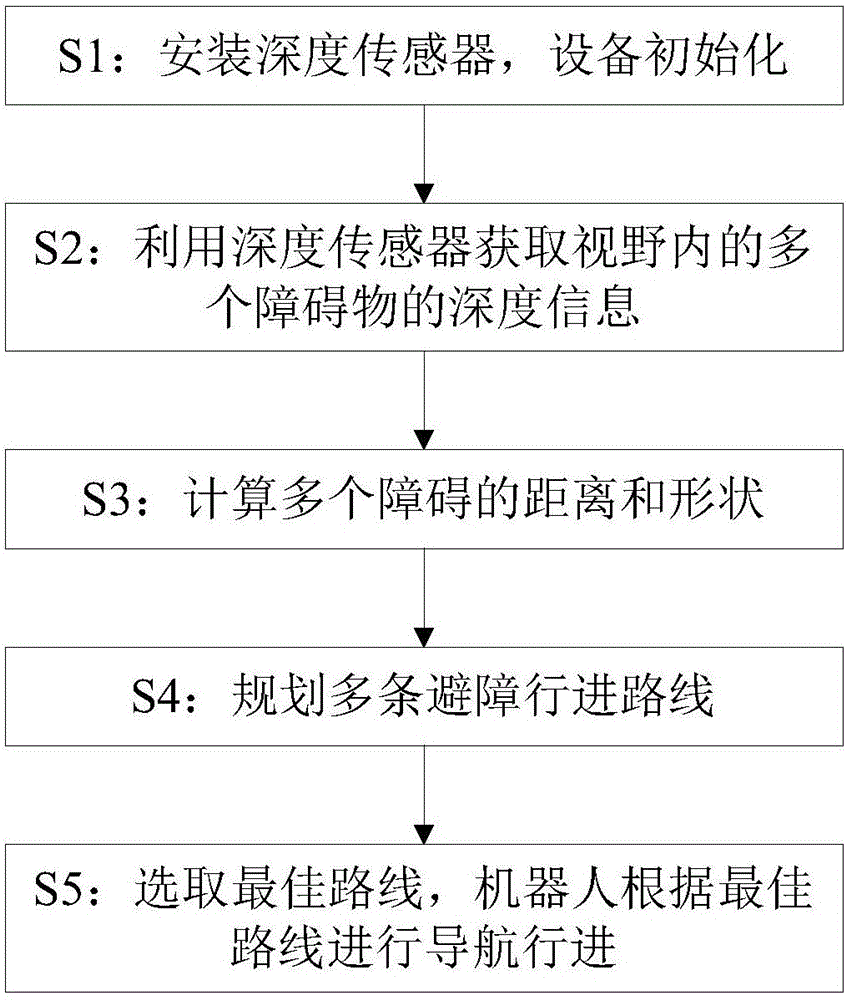
[0041] Such as figure 1 Shown, a kind of robot obstacle avoidance method based on depth sensor of the present invention comprises the following steps:
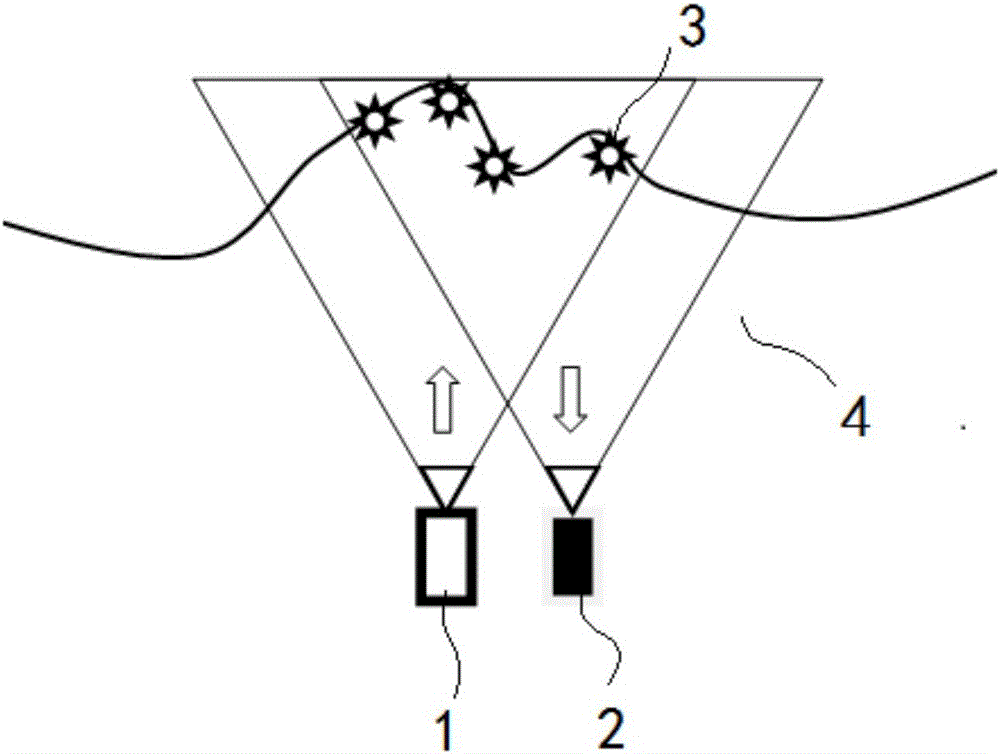
[0042] S1: Install a depth sensor on the robot and initialize the device. Such as figure 2 As shown, the depth sensor includes an infrared emitter 1 and an infrared camera 2, and the infrared emitter and the infrared camera are horizontally arranged in parallel. The depth sensor is similar to binocular recognition, but one of the cameras becomes an infrared emitter and the other becomes an infrared camera, and the infrared camera emits multiple light spots 3 in the environment 4 .
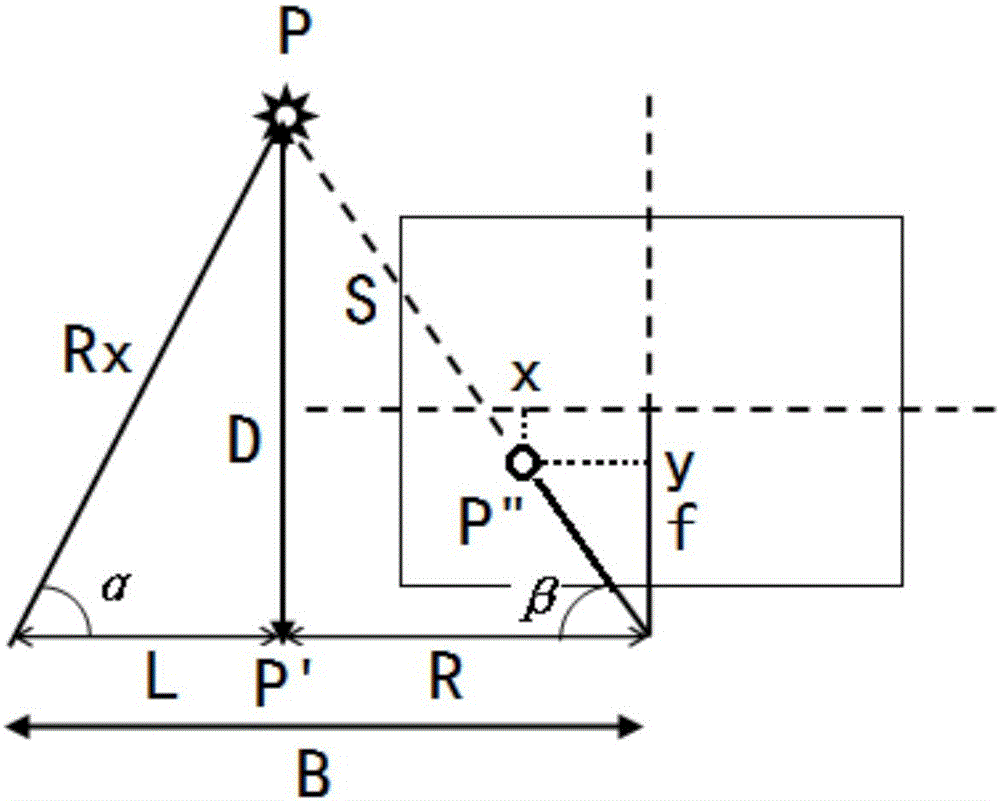
[0043] S2: Turn on the depth sensor, and acquire depth information of multiple obstacles within the field of view according to the depth sensor. image 3 In order to obtain a schematic diagram of the depth information of the light spot, the step S2 specifically includes the following steps:
[0044] S21: The infrared emitter radiates infrared ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More