Laser radar type outdoor autonomously mobile robot provided with automatic stabilization device
A mobile robot and laser radar technology, applied in the direction of manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problem of low success rate of map construction and achieve strong adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
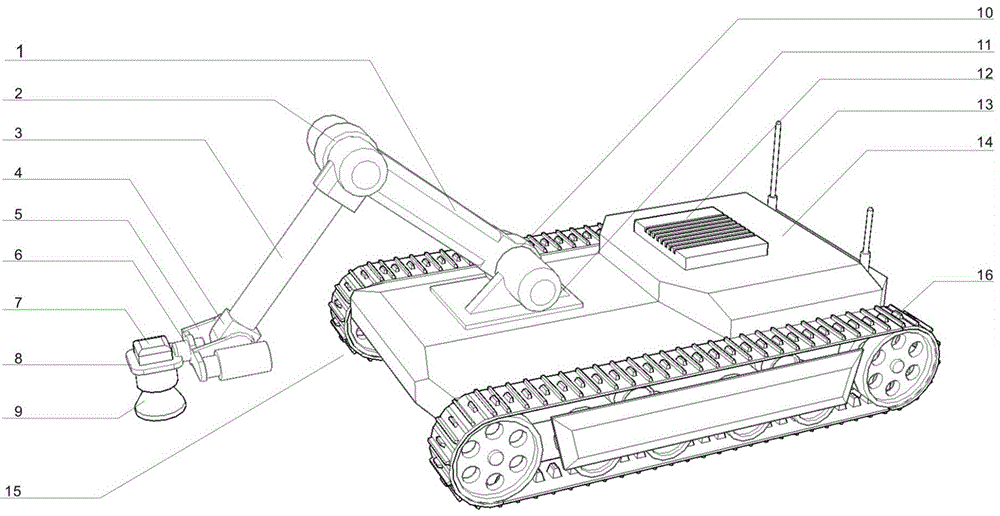
[0022] Such as figure 1 As stated, the present invention has an outdoor autonomous mobile robot with a laser radar with an automatic stabilizing device, consisting of a crawler-type mobile robot chassis without a shock absorber, a four-degree-of-freedom mechanical arm, an inertial measurement unit and a laser radar fixed at the end of the mechanical arm . in:
[0023] The crawler-type mobile robot chassis without damping device is made up of robot chassis controller 12, radio frequency antenna 13, mobile robot body 14, right crawler unit 15, and left crawler unit 16. Wherein the robot chassis controller 12 includes a robot controller and an inertial measurement unit for measuring the attitude of the robot body; the mobile robot body 14 includes the parts of a general mobile robot, including metal structural parts, drive motors, motor drivers, lithium batteries, etc. Make the track move normally. The right side crawler unit 15 and the left side crawler unit 16 respectively c...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap