

Control Method of Overhead Crane Based on Sliding Surface
An overhead crane and control method technology, which is applied in the directions of load hanging components, transportation and packaging, etc., can solve the problems of drastic changes in control input, unfavorable practical applications, and the inability to meet the needs of positioning and swing suppression effects, and achieves good robustness. performance, improved positioning and anti-sway performance, good positioning and anti-sway effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0150] First, the construction of a novel sliding surface based on the transformation model
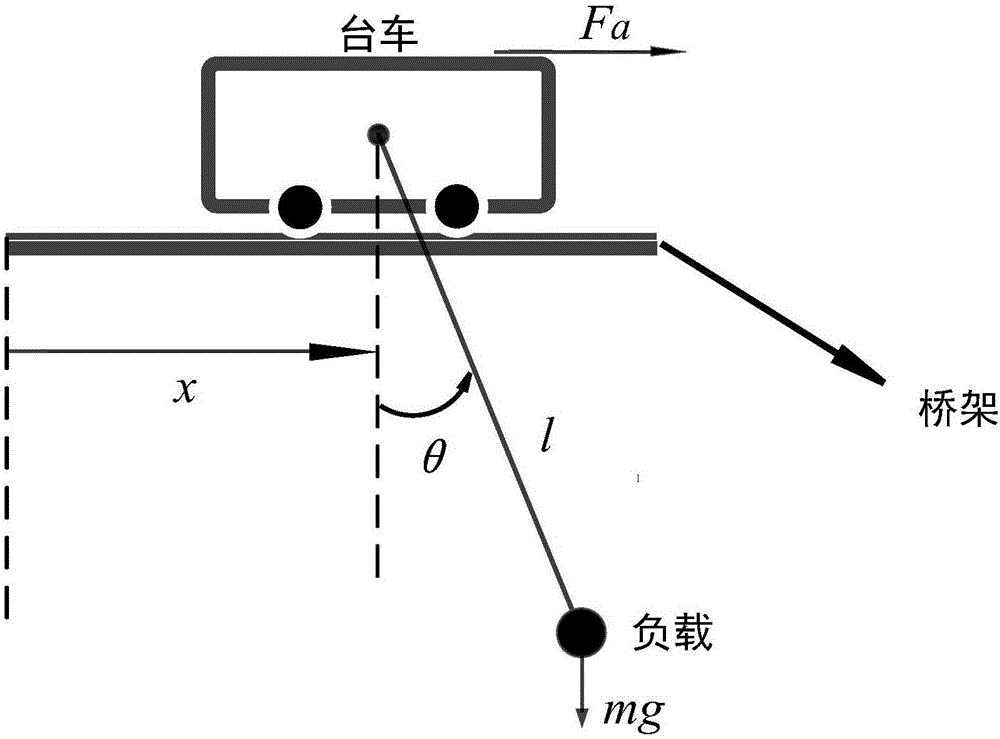
[0151] An overhead crane can generally be expressed by the following dynamic equations:
[0152]
[0153] Among them, M, m, l respectively represent the mass of the trolley, the mass of the load and the length of the sling, θ(t), represent the load swing angle and its first and second derivatives, respectively, x(t), Indicates the displacement of the trolley and its second derivative, and F a (t) and g respectively represent the control input and the acceleration constant of gravity; firstly, the following state transformation is performed:
[0154]
[0155] Among them, η 1 (t), η 2 (t), η 3 (t), η 4 (t) is the newly defined state variable, is the first derivative of the trolley displacement, x d (t), represents the trolley reference trajectory and its first derivative, then the original model (1) can be equivalently transformed into the following form:
[0156] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More