

Method for actually compensating for geometrical errors of five-axis numerical control tooth manufacturing machine tool through inverse kinematics
An inverse kinematics and geometric error technology, applied in program control, computer control, general control systems, etc., can solve problems such as difficult to meet real-time compensation, no mapping relationship between motion axis error and gear processing error, and large amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] In order to make the technical solutions of the present invention clearer, the following describes the technical content of the present invention with reference to the accompanying drawings. It should be understood that the embodiments described herein are only used to explain the present invention, but not to limit the concept and application scope of the present invention.
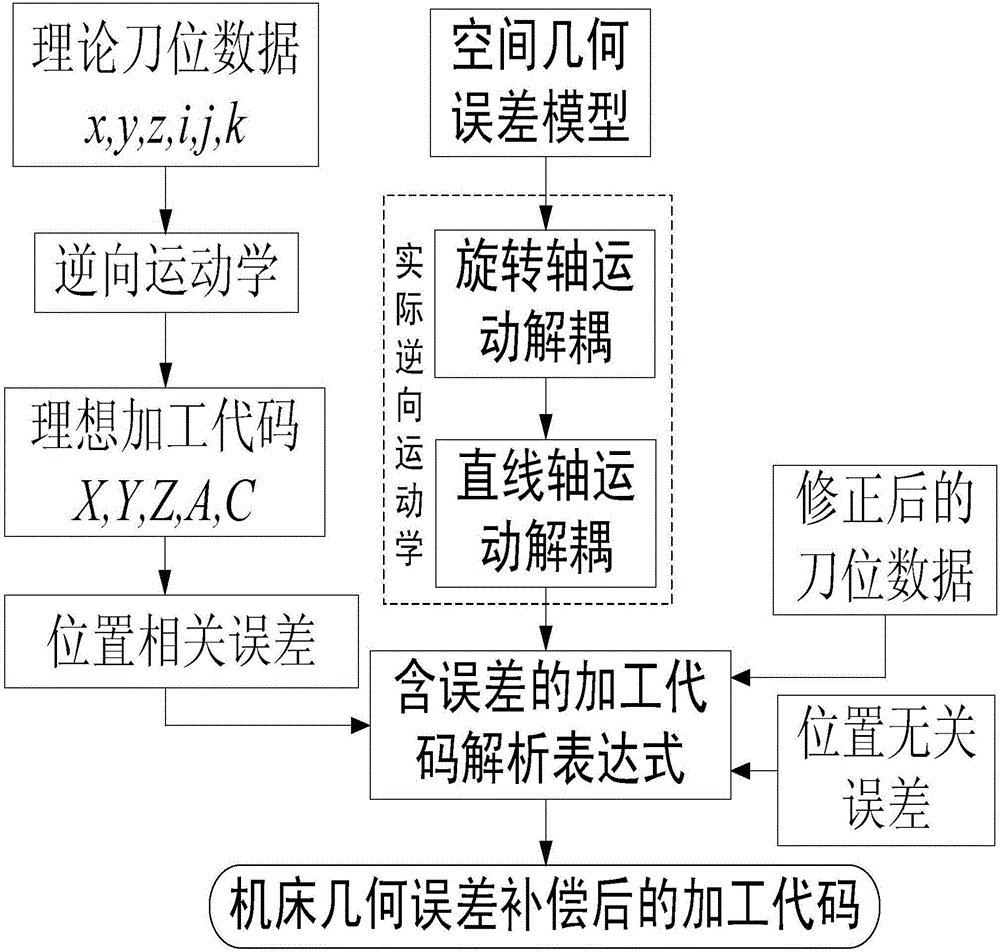
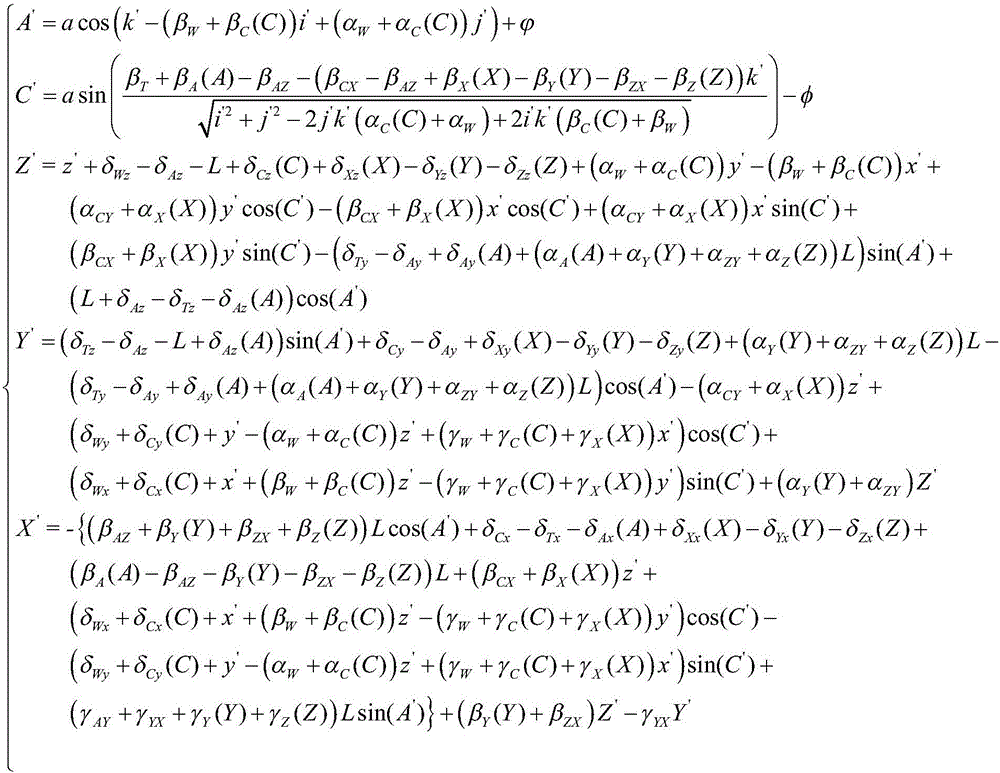
[0062] By establishing a machine tool error kinematic model, the invention solves the motion axis code in the error model, the machine tool geometric error element and the corrected tool position data according to the principles of reversible calculation of homogeneous transformation matrix, associative law, block calculation, etc. Coupling, step-by-step solution to get the analytic expressions of the rotary axis and linear axis code, to achieve rapid compensation of the geometric error of the gear machine tool.
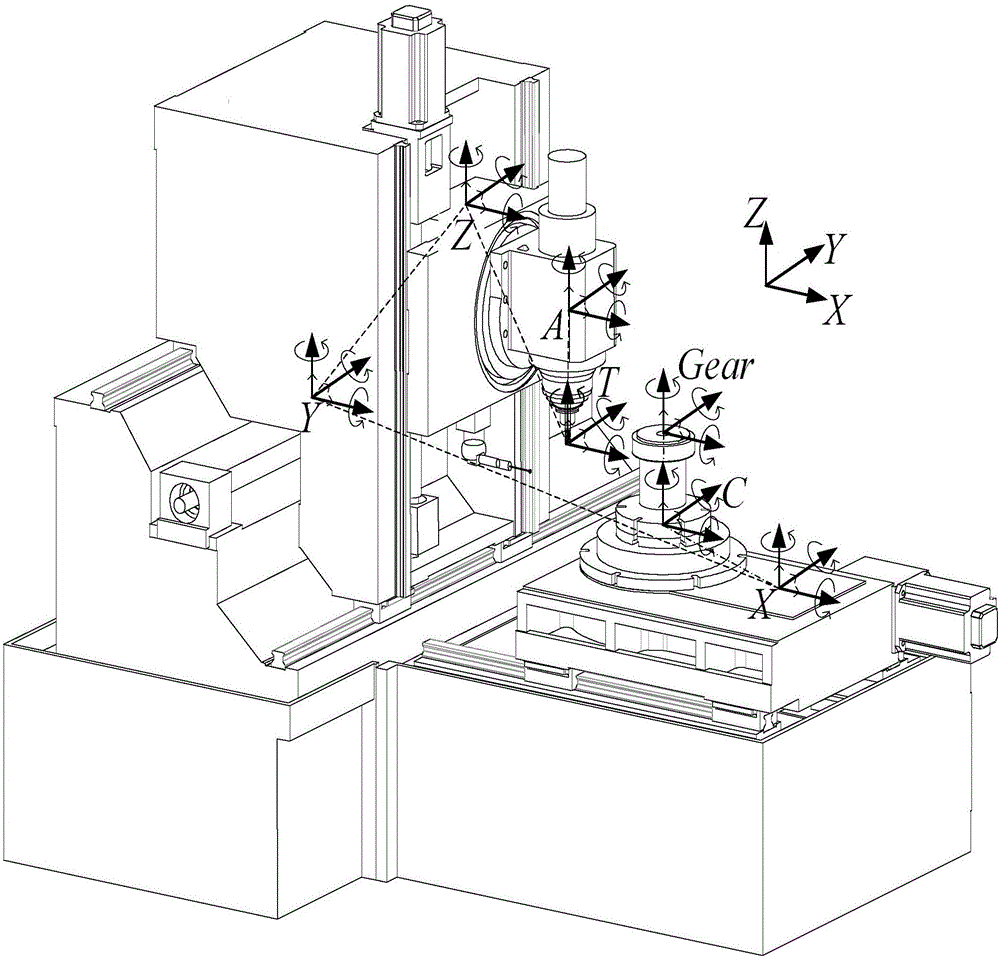
[0063] like figure 2 The shown machine tool axis configuration, taking the X axis ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More