

Intelligent vehicle navigation system and method based on perception and autonomous calculation positioning navigation
A positioning navigation and autonomous computing technology, applied in control/regulation systems, two-dimensional position/channel control, motor vehicles, etc., can solve problems such as inability to realize movement and dynamic path planning, and achieve simple, fast and portable applications strong effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments, and the described specific embodiments are only for explaining the present invention, and are not intended to limit the present invention.
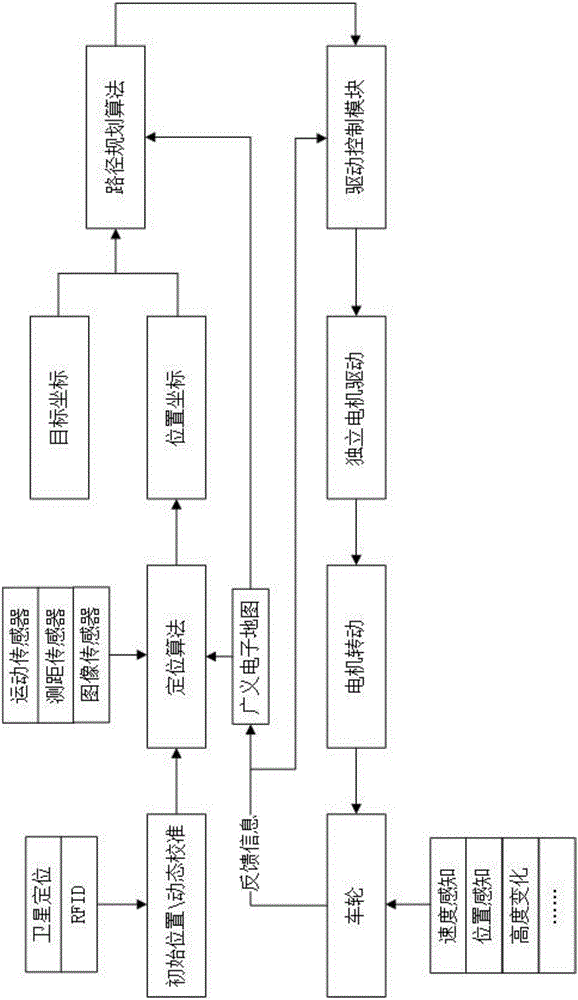
[0026]A smart car navigation system based on perception and autonomous calculation, positioning and navigation proposed by the present invention includes an information storage module, a motor drive module, a positioning module, a perception module and an interactive communication module that are respectively connected to the central processing unit. Of course, it can also be Add other functional modules as needed.
[0027] The central processing unit, the motor drive module and the positioning module are basic functional modules for realizing the positioning, navigation and movement of the intelligent vehicle.
[0028] The movement of each wheel of the intelligent vehicle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More