

Synchronization device and method for high dynamic UAV data link
A technology of synchronization device and unmanned aerial vehicle, applied in the field of communication, can solve the problems of high power consumption, unconsidered, unfavorable miniaturization, etc., to overcome loop convergence and judgment, improve real-time performance and reliability, and avoid loop The effect of instability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
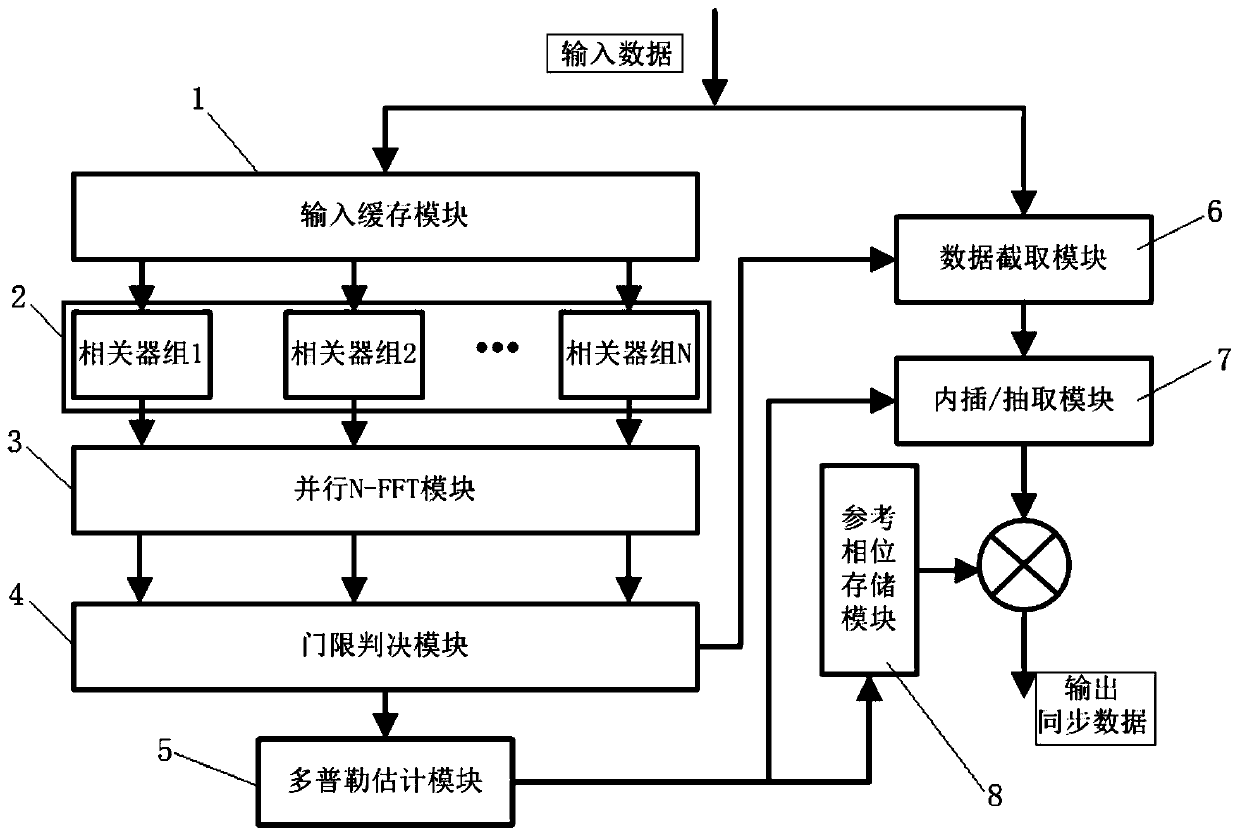
[0059] Embodiment 1: as figure 1 As shown, the present invention provides a synchronization device for a high dynamic unmanned aerial vehicle data link, including an input buffer module 1, a correlator group module 2, a parallel N-FFT module 3, a threshold judgment module 4, a Doppler estimation module 5, Data interception module 6, interpolation / extraction module 7 and reference phase storage module 8;
[0060] The input buffer module 1 is used to receive and buffer data, and provide the data source to be correlated for the correlator group module; the buffer size is L×Q, where L is the length of the received data frame header, and Q is the upsampling multiple of each symbol.
[0061] The correlator group module 2 is connected with the input buffer module 1, and is used for grouping the data in the input buffer module, and performing a group correlation operation with the local pseudo-random sequence, and outputting a correlation result. The grouping mode of the correlator g...
Embodiment 2
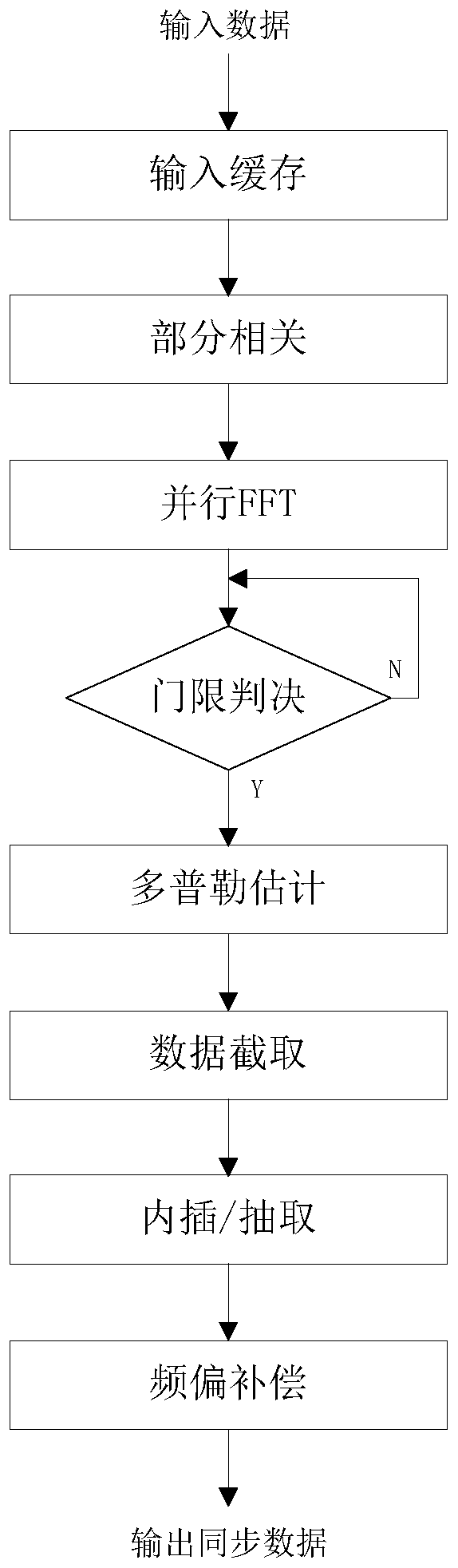
[0068] Embodiment 2: as figure 2 As shown, the present invention also provides a method for synchronizing the high dynamic UAV data link, including:
[0069] Step 1, input cache;
[0070] The input data is stored in the input buffer module, and shifted according to the first-in-first-out order for partial correlation; at the same time, the input data enters the data interception module, and the data is intercepted according to the synchronization time output by the threshold judgment module.
[0071] Step 2, partial correlation;
[0072]Step 2-1, down-sampling the received signal so that its sampling rate is consistent with the local pseudo-random sequence in the correlator group;
[0073] Step 2-2, segmenting the down-sampled signal, and multiplying the signal of each sub-segment with the corresponding local pseudo-random sequence;
[0074] Step 2-3, accumulating the partial correlation results according to the real part and the imaginary part respectively, to obtain the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More