

Automatic obstacle avoidance chassis based on friction ball pairs
An automatic obstacle avoidance and friction ball technology, applied in the field of robotics, can solve the problems of increased chassis space, large rotation radius, lack of obstacle avoidance ability, etc., and achieve the effect of reducing the space occupation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The specific implementation of the present invention will be further described below in conjunction with the accompanying drawings and examples. The following examples are only used to illustrate the technical solutions of the present invention more clearly, but not to limit the protection scope of the present invention.
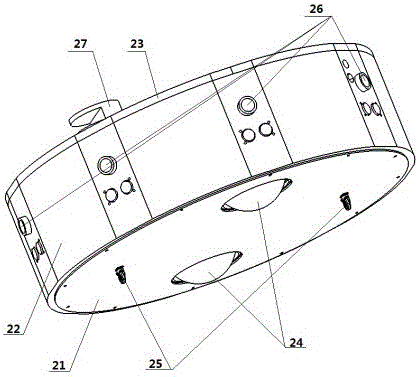
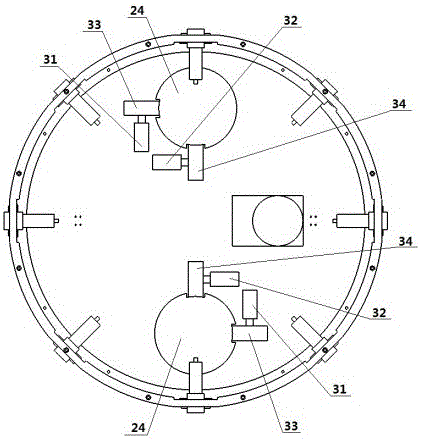
[0021] Such as figure 2 , image 3 , Figure 4 and Figure 5 As shown, the technical solution of the present invention is to design an automatic obstacle avoidance chassis based on a friction ball pair, including a bottom plate 21, a casing 22, an upper cover 23, a motor one 31, a motor two 32, a friction disc one 33, and a friction disc two 34 , friction ball pair 24, universal wheel 25, optical range finder 26 and laser radar 27.
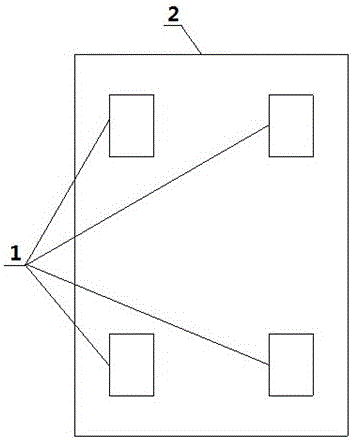
[0022] Eight optical range finder installation holes 51 with an included angle of 45° are opened on the housing 22 .
[0023] Its connection relation is: two described friction discs one 33 are connected above descri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More