Path following method and apparatus of auxiliary parking system
A technology for assisting parking and routing. It is applied in special data processing applications, instruments, electrical and digital data processing, etc. It can solve the problems of small controller calculation and tedious debugging work, and achieve the goal of facilitating algorithm parameter setting, ensuring high precision and high accuracy. The effect of fast convergence of errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described below in conjunction with the embodiments shown in the accompanying drawings.
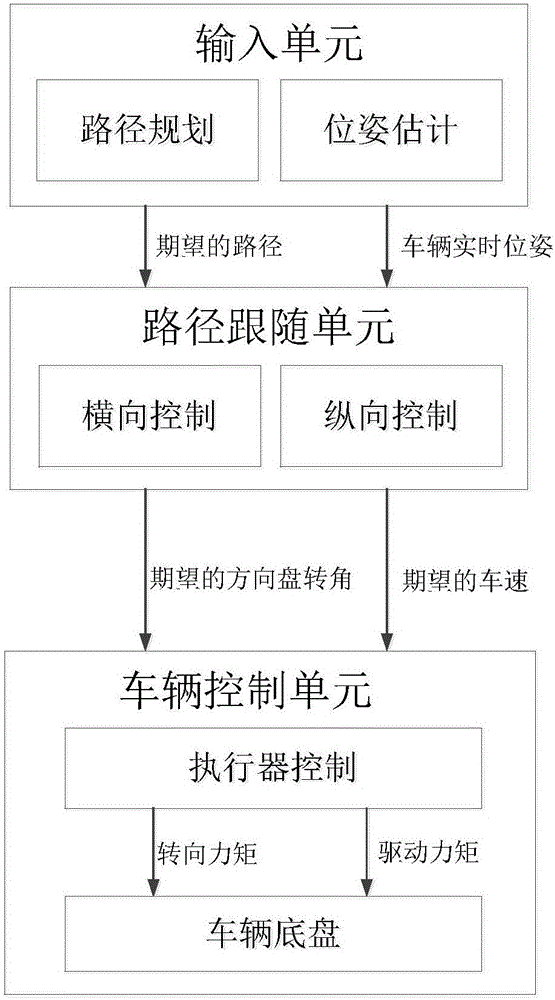
[0032] A path following device of an intelligent assisted parking system according to the present invention, such as figure 1 As shown, it includes: input unit, path following unit and vehicle control unit.
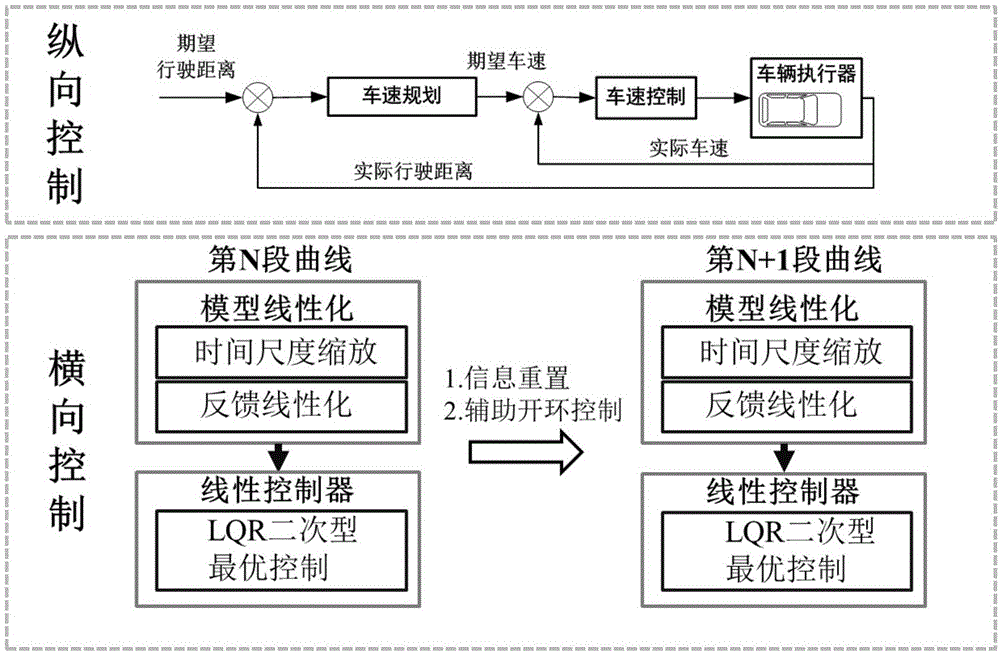
[0033] The path following unit includes two sub-modules of lateral control and longitudinal control, such as figure 2 shown. Lateral control: compare the real-time vehicle pose returned by the pose estimation unit with the planned path to obtain the real-time tracking error, obtain the linear system in the new time domain through time scale scaling and feedback linearization, and introduce the quadratic performance of the following error Index, the linear quadratic optimal controller (LQR) performs closed-loop control on the linear system. And the method of open-loop auxiliary control is used to solve the algorithm singular point probl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More