

Multi-robot welding method and system
A welding system and multi-robot technology, applied in welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., can solve problems such as low production efficiency, achieve the effects of increasing output ratio, saving costs, and optimizing design structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0104] Embodiment one, such as Figure 6 as shown,
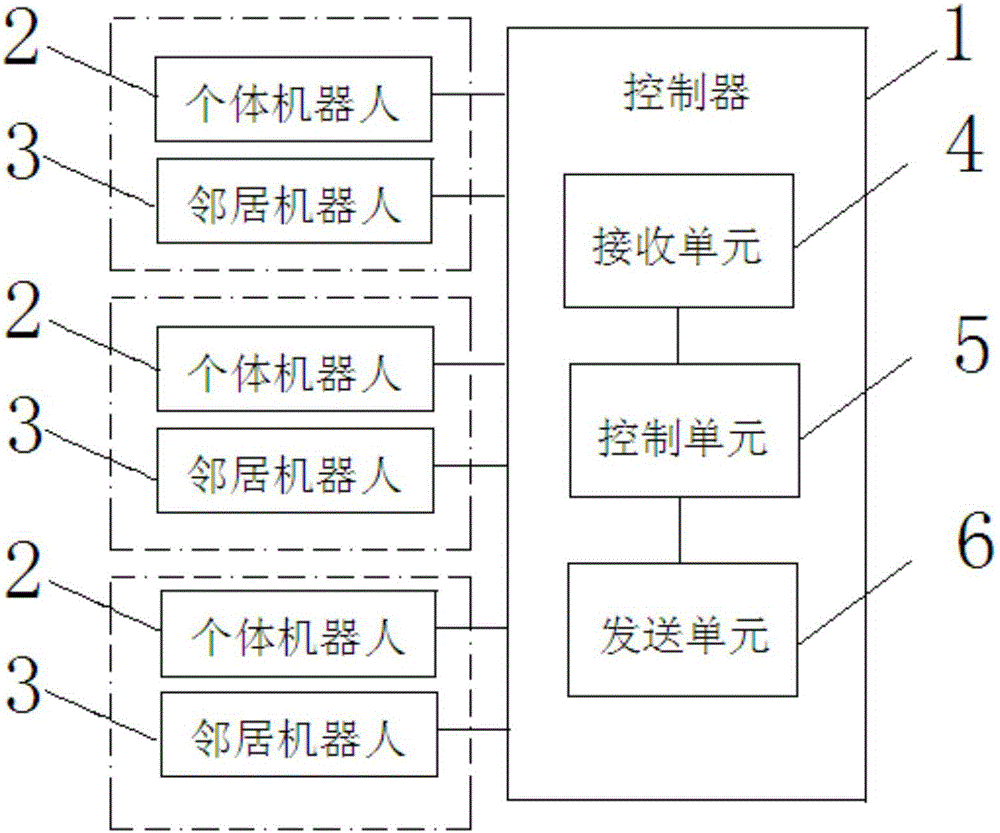
[0105]The receiving unit 4 includes: a first receiving module 7, the first receiving module 7 is used to receive and output the above-mentioned operation request sent by the above-mentioned individual robot 2 located outside the above-mentioned interference area, and receive and output the status information of the above-mentioned neighbor robot 3 ;
[0106] The above-mentioned control unit 5 includes: a first processing module 10, and the above-mentioned first processing module 10 is connected to the above-mentioned first receiving module 7 for receiving the above-mentioned operation request and outputting the first query request according to the above-mentioned operation request, and receiving the above-mentioned status information and according to the above-mentioned The state information judges whether the neighbor robot 3 is located in the interference zone, and outputs a first control command when it is judged that th...
Embodiment 2
[0111] Embodiment two, such as Figure 7 as shown,
[0112] The above-mentioned receiving unit 4 includes: a second receiving module 8, the above-mentioned second receiving module 8 is used to receive and output the above-mentioned operation request sent by the above-mentioned individual robot 2 and the above-mentioned neighbor robot 3 located outside the above-mentioned interference area, and receive and output the above-mentioned individual robot. State information of robot 2 and the aforementioned neighbor robot 3;
[0113] The above-mentioned control unit 5 includes: a second processing module 11, the above-mentioned second processing module 11 is connected to the above-mentioned second receiving module 8, and is used to receive the above-mentioned operation request and output a second query instruction according to the above-mentioned operation request, and receive and process the above-mentioned status information and Outputting a third control instruction and a fourth ...
Embodiment 3
[0118] Embodiment three, such as Figure 8 as shown,
[0119] The above-mentioned receiving unit 4 includes: a third receiving module 9, the above-mentioned third receiving module 9 is used to receive and output the above-mentioned operation request sent by the above-mentioned individual robot 2 located in the above-mentioned interference area, and receive and output The reminder information sent by the above neighbor robot 3;
[0120] The above-mentioned control unit 5 includes: a third processing module 12, and the above-mentioned third processing module 12 is connected to the above-mentioned third receiving module 9 for receiving the above-mentioned running request and outputting the fifth control instruction according to the above-mentioned running request, and receiving the above-mentioned reminder information and according to the above-mentioned The above reminder information outputs the sixth control instruction and the seventh control instruction;
[0121] The above-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More