

Auxiliary carrying stair-climbing robot combined with wheel track
A stair-climbing and robotic technology, applied in the field of robotics, can solve the problems of high physical effort, difficulty in transporting goods, and low efficiency, and achieve the effects of high space utilization, compact structure, and strong adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be described in further detail below in conjunction with the accompanying drawings.
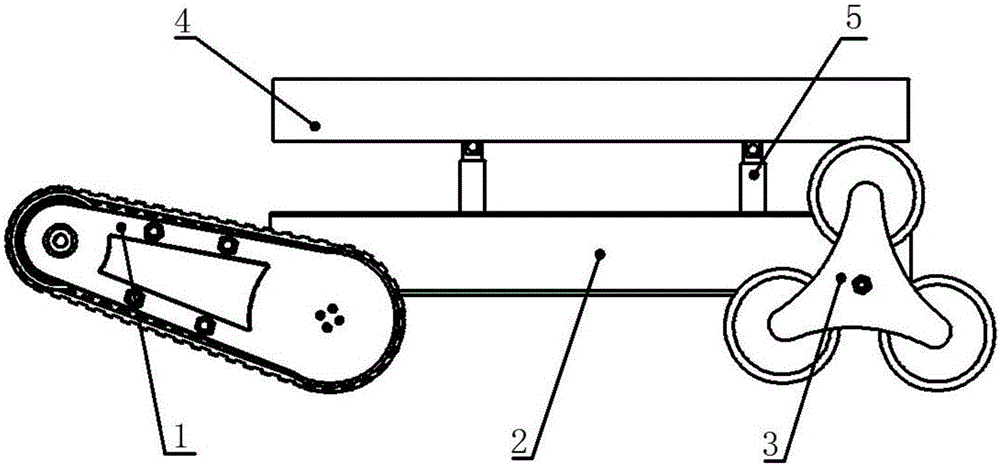
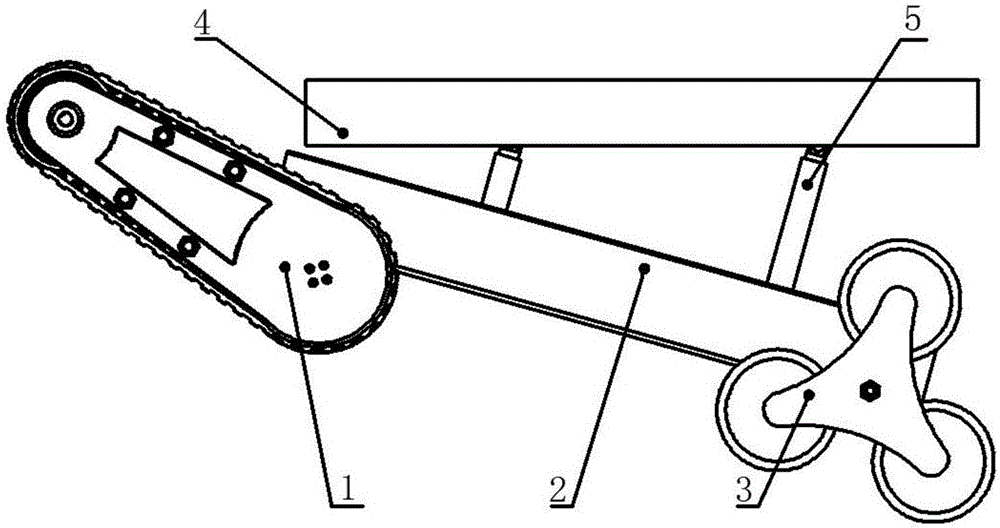
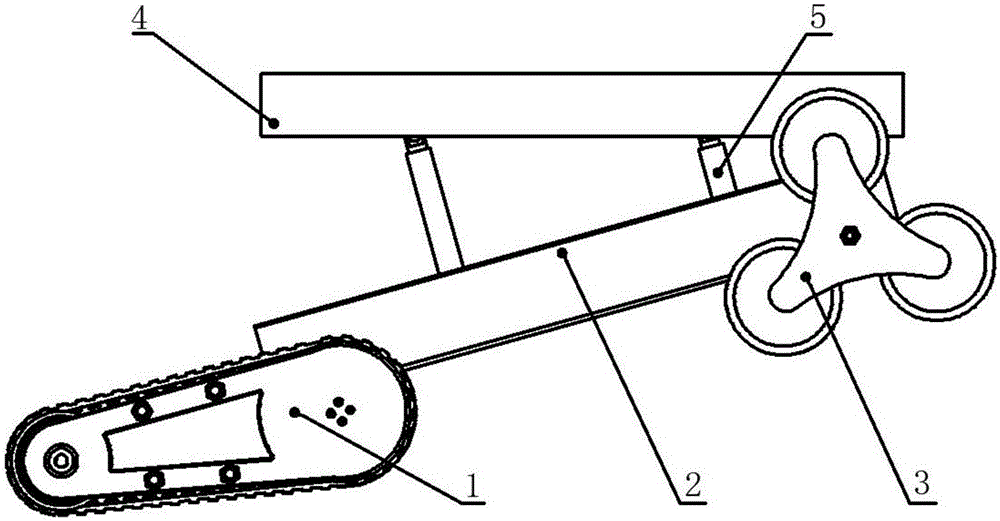
[0020] combine figure 1 , a wheel-shoe combined with auxiliary transport stair-climbing robot, including a car body 2, a loading platform 4, two sets of track wheel mechanisms 1, two sets of triangular wheels 3 and four electric push rods 5, the car body 2 is arranged in parallel on the loading Below the platform 4, four electric push rods 5 are distributed in a square shape between the two. Two groups of track wheel mechanisms 1 are symmetrically arranged on both sides of the head of the car body 2, and two groups of triangular wheels 3 are symmetrically arranged on both sides of the car body 2 tail.
[0021] The present invention realizes the self-balancing function of the loading platform 4 through the electric push rod 5, so that it has three modes: horizontal, forward, and backward. Rod 5 adjusts the inclination. When going up the stairs, the three whe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More