

Robot walking obstacle avoidance method based on information fusion and environmental perception
An environment perception and robot technology, applied in the field of robots, can solve the problems of ignoring the historical walking state, reducing the accuracy of obstacle avoidance, and discretizing the state. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be described in further detail below in conjunction with the accompanying drawings.
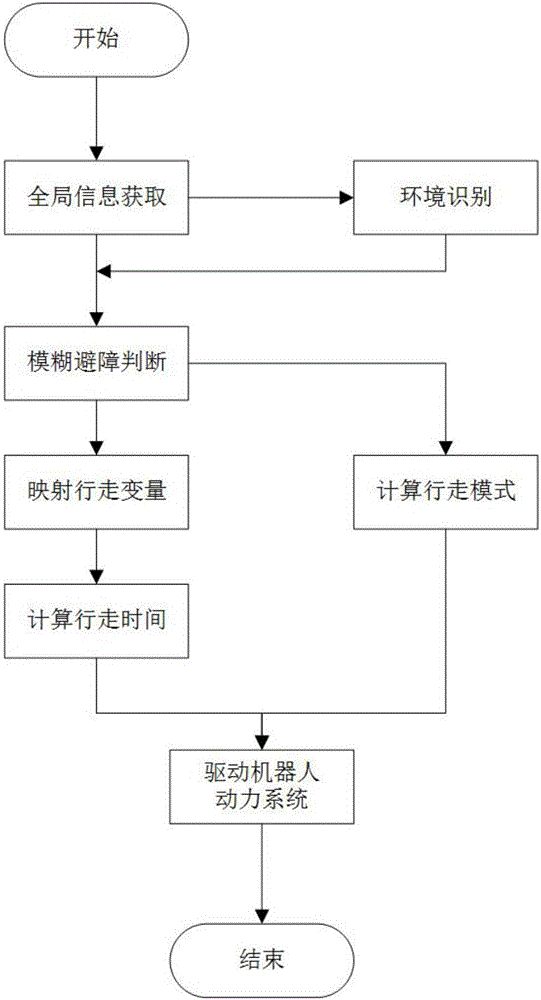
[0047] attached figure 1 , the realization steps of the present invention are as follows.
[0048] Step 1, set up the sensor.
[0049] The distance information is obtained through multiple types of sensors deployed in different positions of the robot body. Commonly used ranging sensors include optical sensors and acoustic sensors, and the present invention selects infrared ranging sensors and ultrasonic ranging sensors.
[0050] refer to Figure 4 , the present invention sets the following sensors on the robot according to the ranging requirements:
[0051] Set up the left azimuth ultrasonic sensor, the positive azimuth ultrasonic sensor, the right azimuth ultrasonic sensor, the left azimuth infrared sensor, and the right azimuth infrared sensor on the front side of the robot fuselage to measure the distance signals at various angles on the front side of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More