

Dynamic compensation method for three-dimensional laser distance metering data of mobile robot in moving process
A robot motion, 3D laser technology, applied in distance measurement, image data processing, instruments, etc., can solve the problems of sparse 3D laser data, unable to meet scene reconstruction, application requirements for environmental understanding, limited viewing angle, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The specific implementation manners of the present invention will be described in detail below in conjunction with the technical solutions (and accompanying drawings).
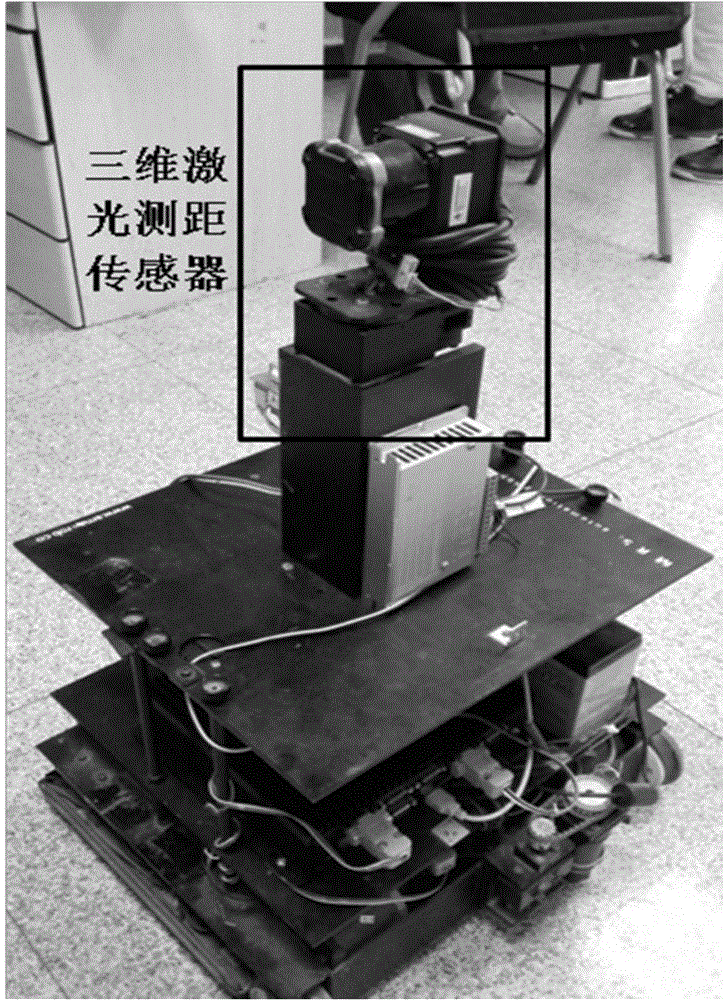
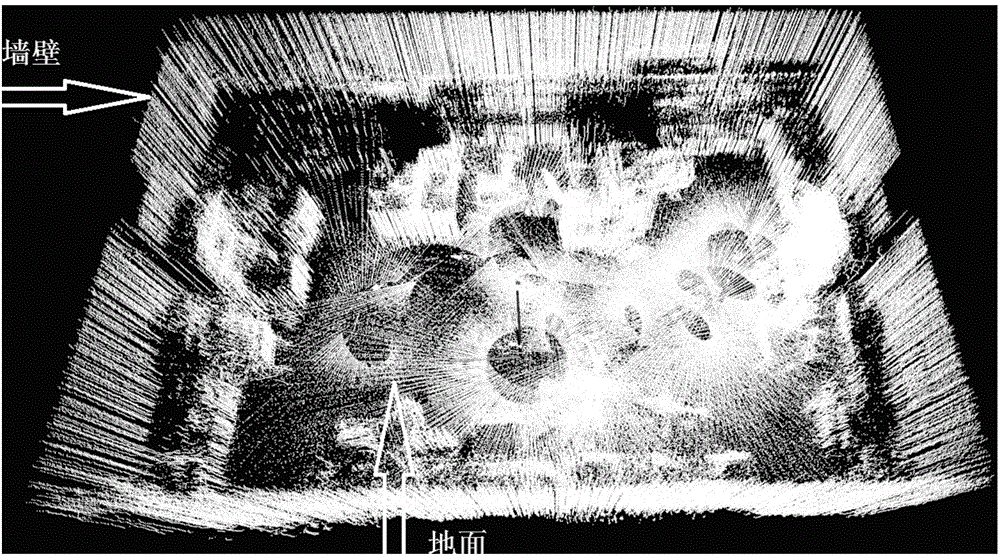
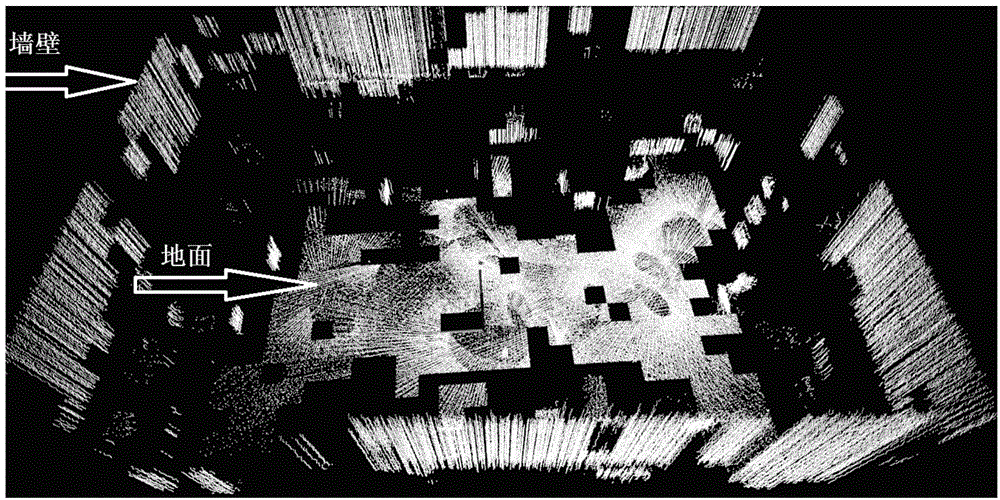
[0066] In this experiment, the laser ranging data collected by the mobile robot is used to reconstruct the experimental scene. The effectiveness of this method is verified by comparing the three scenes reconstructed by only using the odometer compensation method and applying the proposed compensation method. use figure 1 The SmartROB-2 autonomous mobile robot system was used for experiments. The laser sensor adopts UTM-30LX laser sensor, its plane scanning angle is 0 to 270 degrees, the measurement distance is 0.1 to 30 meters, the angular resolution is 0.25 degrees, and the scanning frequency is 40 frames per second. The laser sensor is installed on the rotating pan-tilt, and the built-in motor of the pan-tilt drives the laser to rotate 360 degrees on the horizontal plane, and the laser scanning p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More