

Guide robot and its moving area calibration method
A moving area and robot technology, applied in the directions of instruments, manipulators, program-controlled manipulators, etc., can solve the problems of human injury, collision of guide robots, ignorance of guide robots, etc., to achieve the effect of efficient movement and protection of safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only part of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
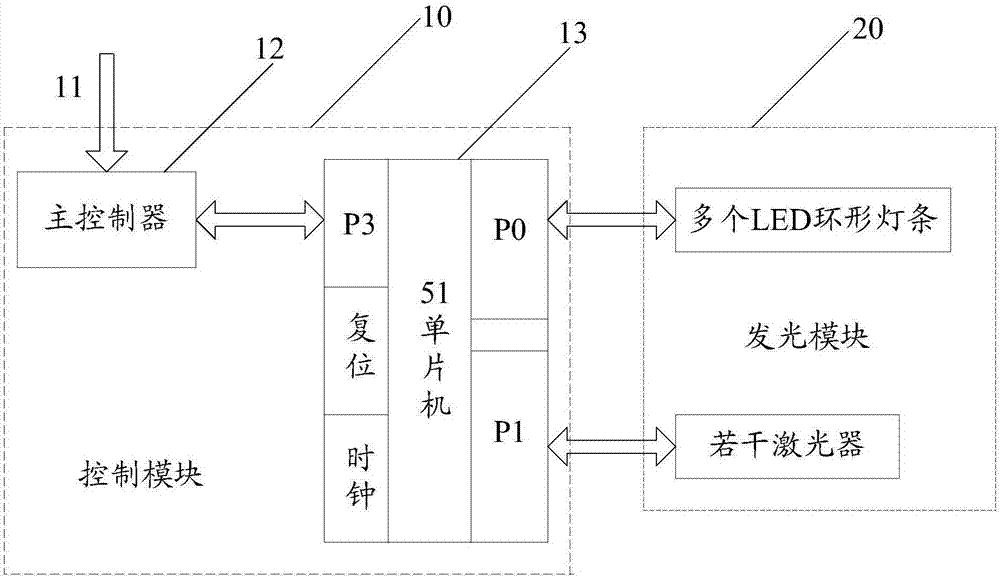
[0042] The present invention proposes a navigation robot, such as figure 1As shown, the light-emitting module is mainly added to the guide robot, and the light-emitting module 20 is controlled by the control module 10 to perform light display calibration on the area where the guide robot is about to move, so that people can intuitively know that the guide robot The activity direction and activity trend of the robot can effectively avoid the collision...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More