

Single port laparoscopic surgery system with front-loaded drive
A surgical system and laparoscopic technology, applied in the field of medical devices, can solve the problems of porous laparoscopic surgical robots that cannot be modified, complex hand-eye coordination requirements, and limited flexibility of surgical tools, etc., to achieve compact external space layout, fast installation, The effect of ensuring simplicity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] Preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings, so as to better understand the purpose, features and advantages of the present invention. It should be understood that the embodiments shown in the drawings are not intended to limit the scope of the present invention, but only to illustrate the essence of the technical solutions of the present invention.
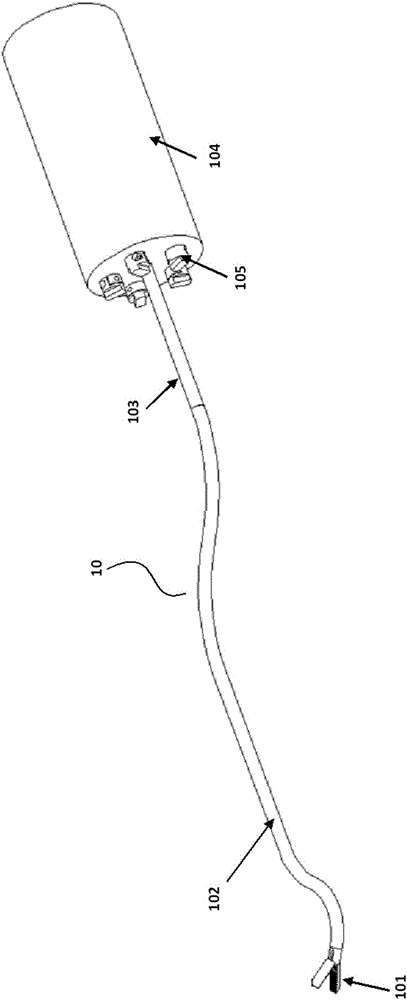
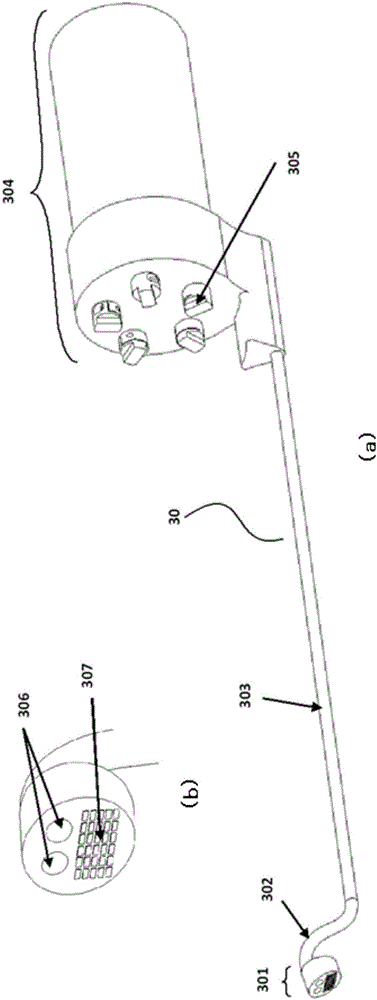
[0029] Such as figure 1 , Figure 3 ~ Figure 5 As shown, the single-port laparoscopic surgery system provided by the present invention includes a flexible surgical tool 10 , an imaging tool 30 , a catheter body 40 and a driving body 50 .
[0030] Wherein, the flexible surgical tool 10 includes a surgical actuator 101 , a flexible arm body 102 , a rigid arm body 103 , a flexible surgical tool drive transmission unit 104 and a drive input interface 105 . The surgical actuator 101 is firmly connected to the distal end of the flexible arm body 102...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More