

Magnetic resistance type upper limb and lower limb passive and active rehabilitation training robot
A rehabilitation training, active and passive technology, applied in the direction of muscle training equipment, passive exercise equipment, coordination training equipment, etc., can solve the problems of inability to achieve stable and continuous rehabilitation training, and achieve compact structure and easy assembly Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
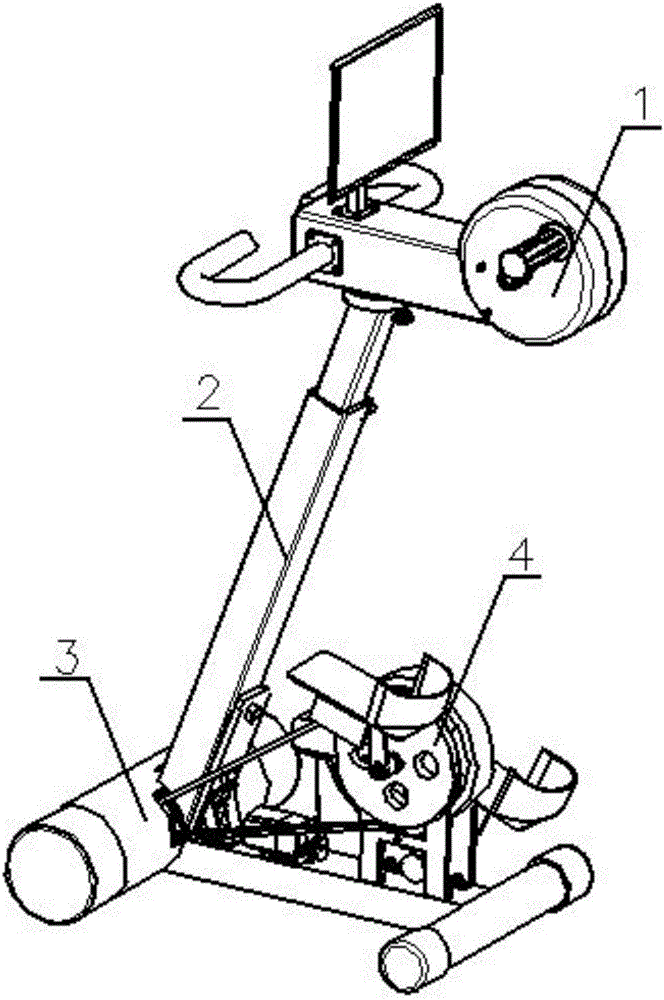
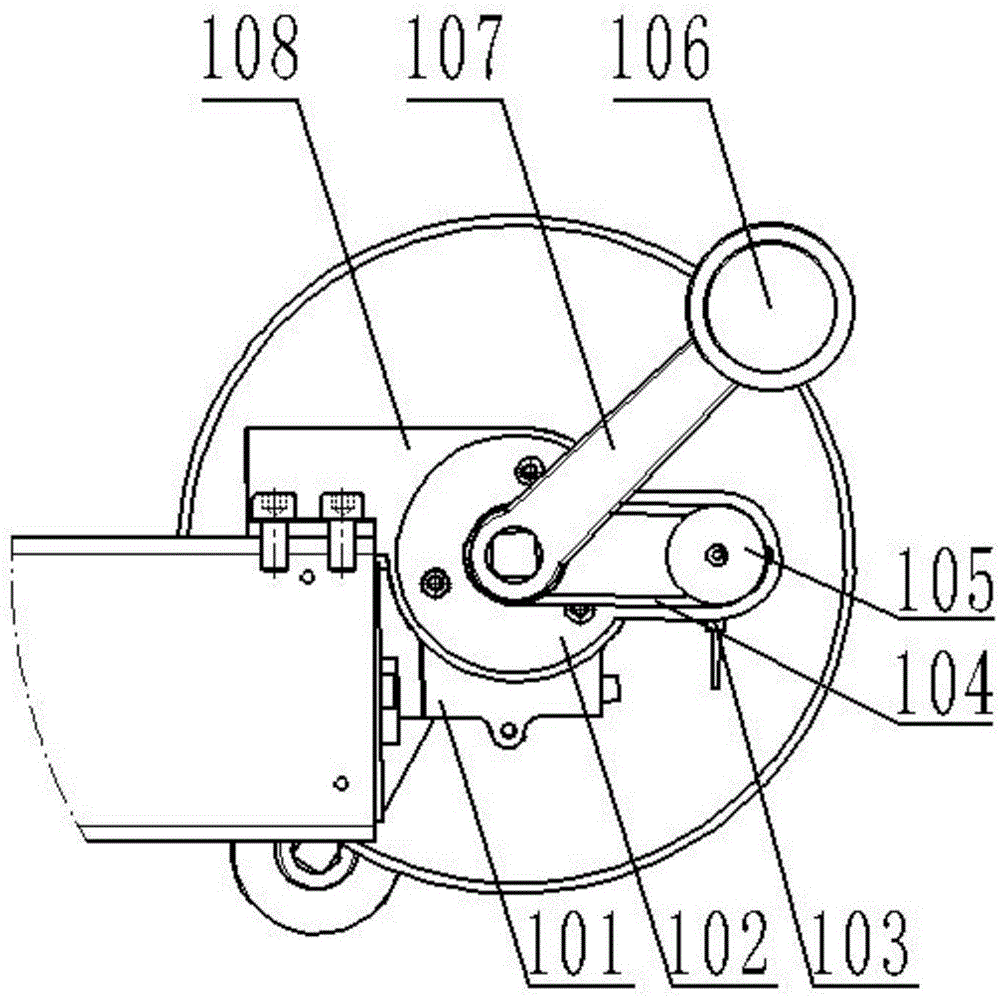
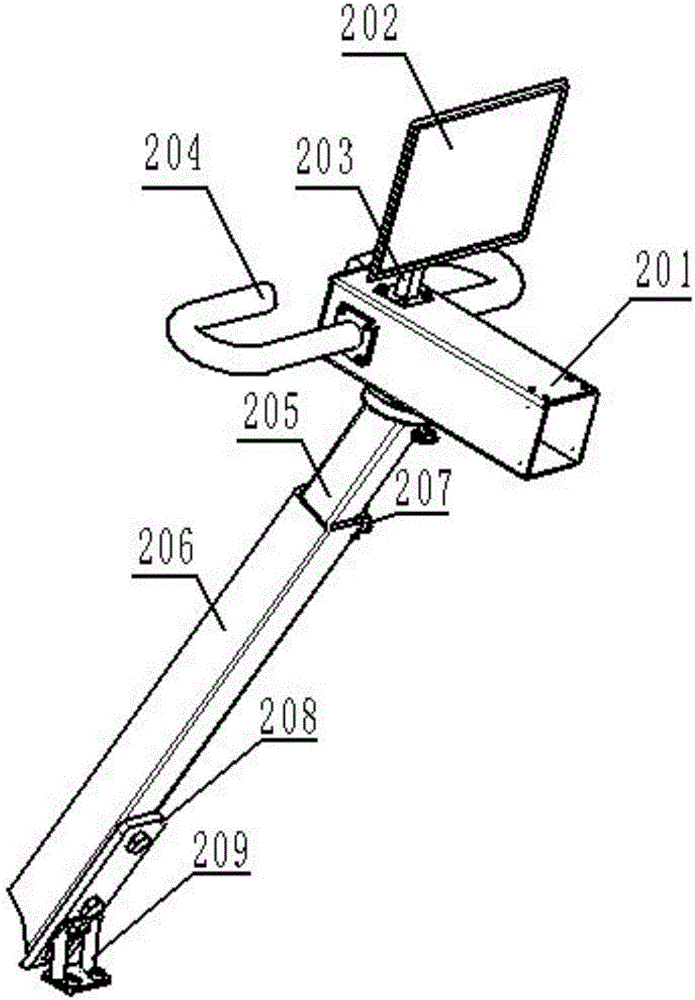
[0012] refer to figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Image 6 , the present invention provides a magnetic resistance active and passive rehabilitation training robot for upper and lower limbs, which is composed of an upper limb motor module 1, an upper limb rotation lifting module 2, a flywheel structure 3, and a lower limb magnetic resistance active and passive adjustment module 4; it is characterized in that: the upper motor The motor fixing frame 108 in module 1 is connected with the upper horizontal bracket 201 by bolts, the display bracket 203 is connected with the upper horizontal bracket 201 by bolts, the rotating upper plate 501 is connected with the upper horizontal bracket 201 by bolts, and the rotating lower plate 502 is connected with the lifting inner tube 205 welding, the lifting outer tube 206 is connected to the support transition plate 208 by bolts, the support transition plate 208 is connected to the support frame 209 by bolts, the su...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More