

Path Planning Method for Mobile Robot Based on Improved Genetic Algorithm
A mobile robot and path planning technology, applied in genetic rules, instruments, genetic models, etc., can solve the problems of slow running speed and genetic algorithm falling into local optimum, and achieve the effect of improving performance and speeding up search efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
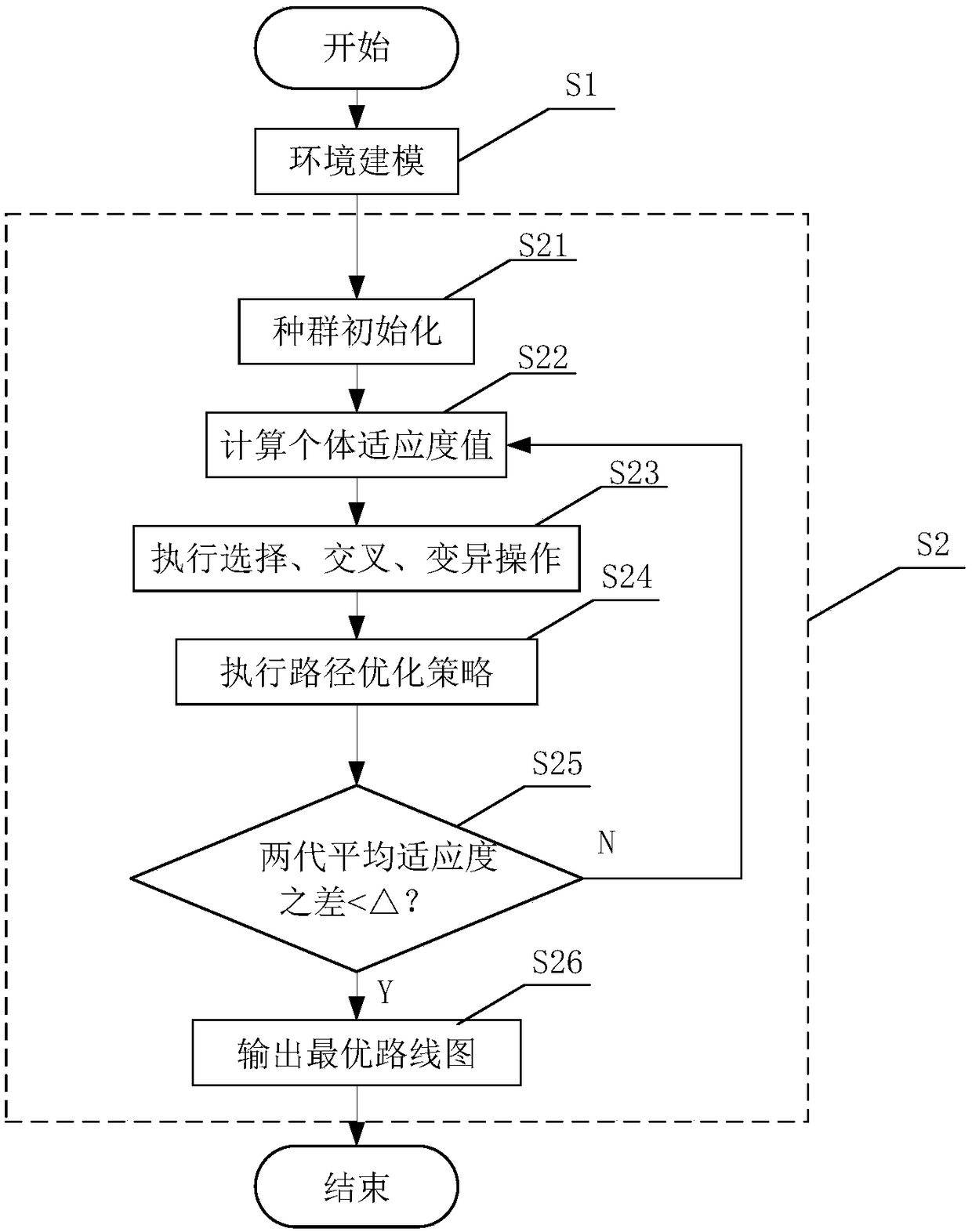
[0071] Such as figure 1 As shown, this implementation 1 provides a mobile robot path planning method, including the following steps:
[0072] Step S1, environment modeling; and
[0073] Step S2, execute the genetic algorithm to output the optimal path.
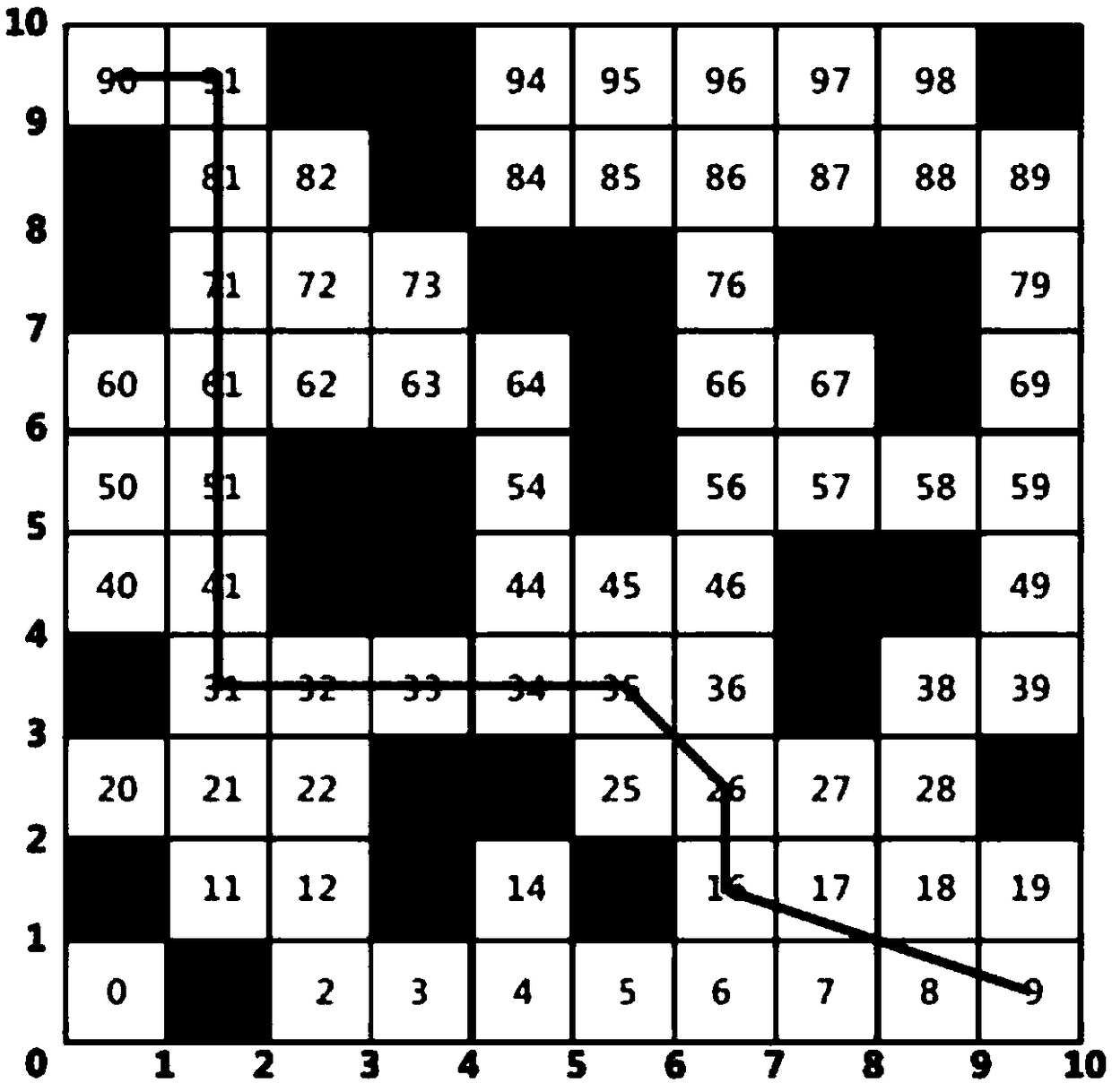
[0074] The step S1 environment modeling is to model the working environment of the mobile robot to establish a coordinate system. The method includes: using the mobile robot's own sensor group (such as but not limited to a camera, sonar ring, infrared sensor) to collect the working environment Information, and map modeling; where the mobile robot is used as a particle, the mobile robot and obstacles are modeled according to the two-dimensional coordinate system, and the two-dimensional workspace is divided by grids of the same size, so that the mobile robot can freely move in this space sports;
[0075] If there is an obstacle in a grid, define this grid as an obstacle grid, otherwise it is a free grid; and
[0076] Number...
Embodiment 2
[0109] On the basis of embodiment 1, this embodiment 2 provides a mobile robot path planning system,
[0110] The mobile robot path planning system includes:
[0111] a modeling unit to model the working environment of the mobile robot to establish a coordinate system;
[0112] A path calculation unit executes a genetic algorithm to output an optimal path.
[0113] Specifically, the mobile robot has its own sensor group to collect the working environment information and perform map modeling; where the mobile robot is used as a particle, the mobile robot and obstacles are modeled according to the two-dimensional coordinate system, and the grid with the same size Divide the two-dimensional workspace so that the mobile robot can move freely in the space;
[0114] If there is an obstacle in a grid, define this grid as an obstacle grid, otherwise it is a free grid; and
[0115] Number each grid with a serial number, and each number N corresponds to its rectangular coordinates on...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More