

Electric quadruped robot with variable mechanism configuration
A quadruped robot, configuration technology, applied in motor vehicles, transportation and packaging, etc., can solve the problems of biped robots such as difficult to control balance, inflexible body shape, weak load capacity, etc., and achieve high energy utilization rate and high efficiency , the effect of fast action speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
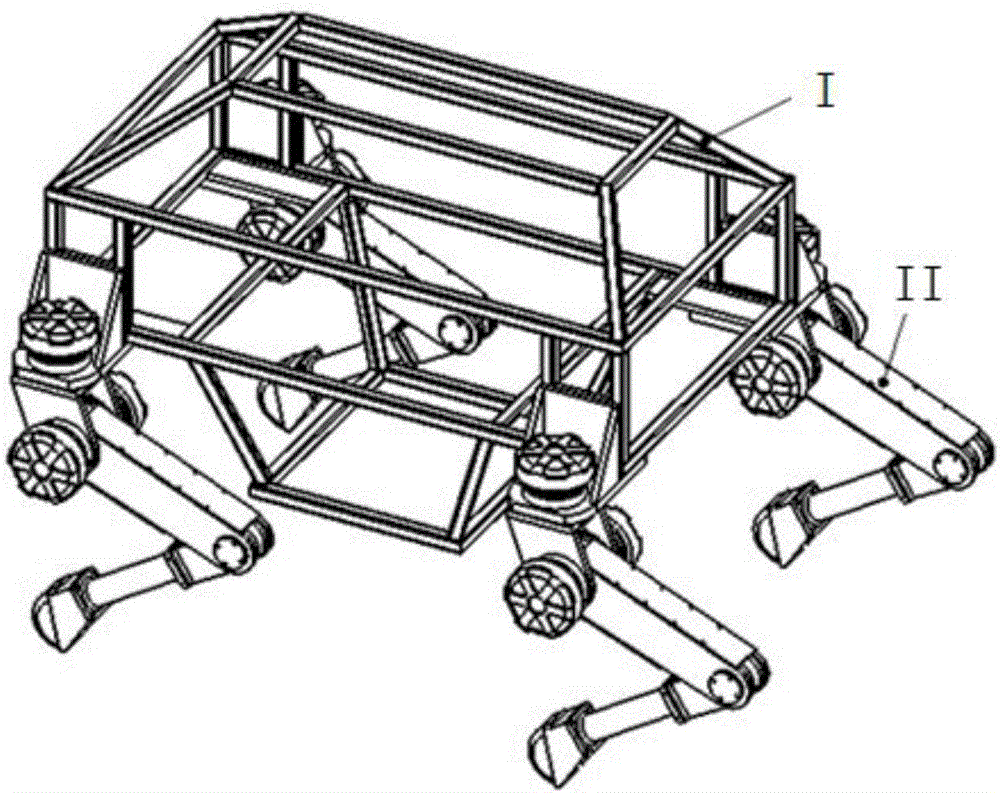
[0027] Such as figure 1 As shown, the variable electric quadruped robot of the present invention includes a torso I and four legs II, and the four legs II are connected to the torso I. Each leg II is composed of three transmission chains, namely the first transmission chain, the second transmission chain and the third transmission chain, and the first transmission chain, the second transmission chain and the third transmission chain are connected together in turn, so that each The legs have three degrees of freedom. The first transmission chain is connected with the trunk 1.
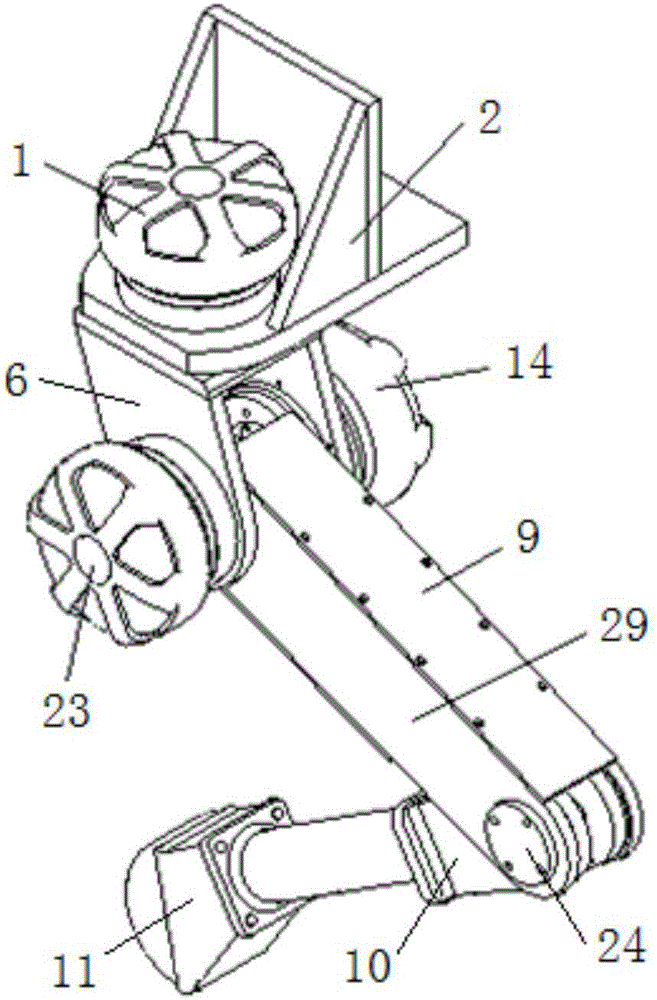
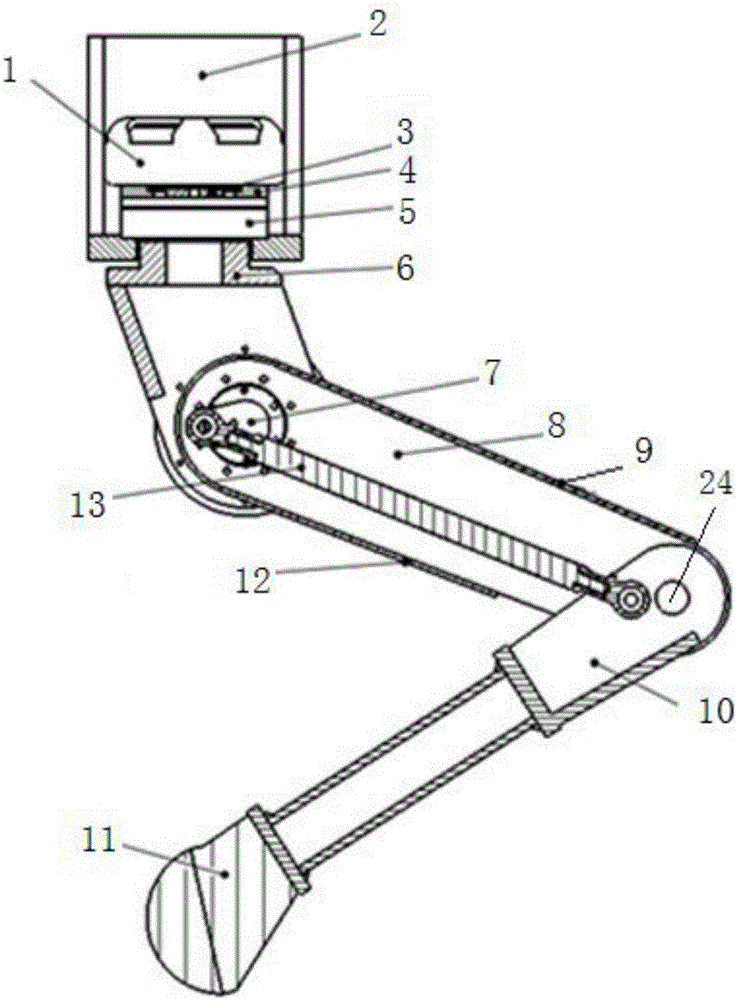
[0028] Such as figure 2 with image 3 As shown, the first transmission chain is a hip joint transmission chain, including a hip joint platform 2, a first disc motor 1, a first input terminal connection disc 3, a first harmonic input connection disc 4, a first harmonic reducer 5 and a hip Joint axis 6. The hip joint platform 2 is fixed on the bottom of the torso 1 by screws. The first harmonic redu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More