Drill clamping device of minimally invasive spine surgery robot
A minimally invasive surgery and clamping device technology, which is applied in the fields of surgical robots, surgery, medical science, etc., can solve the problems of long operation time, high labor intensity, difficult operation, etc., and achieves wide application, strong practicality, and wide range of use wide effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
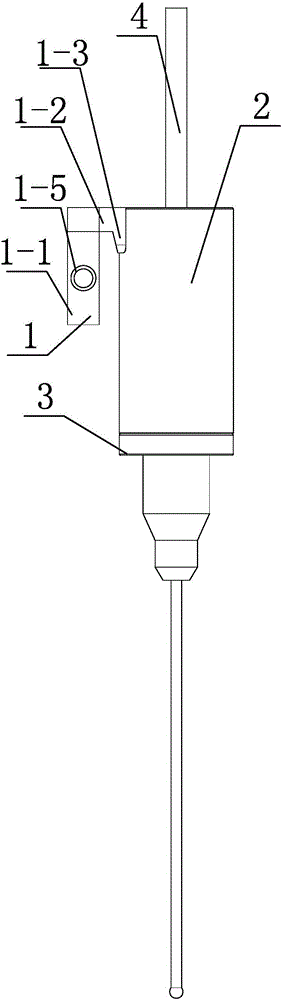
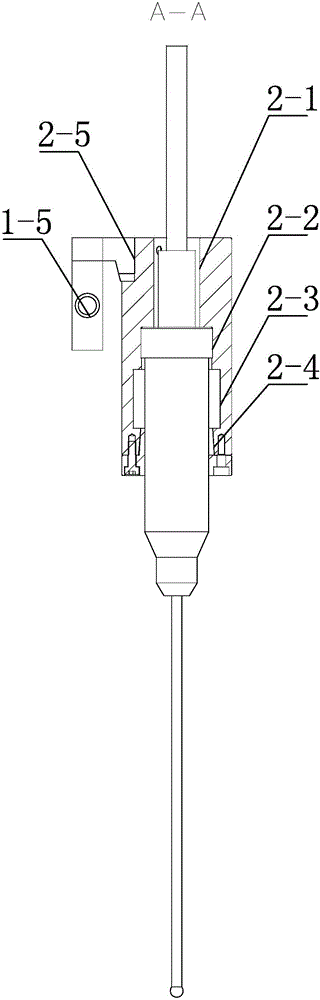
[0009] Specific implementation mode one: combine Figure 1-Figure 9 Describe this embodiment mode, a kind of spinal minimally invasive surgery robot grinder clamping device described in this embodiment mode, it comprises V block joint 1, grinder drill clamp seat 2, locking end 3, two V block joint screws 5 and Four locking end fixing screws 6, the drill holder 2 is a circular cylinder, and the inner wall of the drill holder 2 is sequentially processed with a first round hole 2-1 and a second round hole 2 from top to bottom. -2, the third circular hole 2-3 and the tapered hole 2-4, and the first circular hole 2-1, the second circular hole 2-2, the third circular hole 2-3 and the tapered hole 2-4 in sequence Connected, the locking end 3 is an annular body, the V-block joint 1 is fixedly installed on the side wall of the grinding drill holder 2 near the top through two V-block joint screws 5, and the grinding drill 4 is inserted into the tapered hole from bottom to top 2-4. In t...
specific Embodiment approach 2
[0010] Specific implementation mode two: combination Figure 1-Figure 5 Describe this embodiment, a kind of spinal minimally invasive surgery robotic grinding and clamping device described in this embodiment, V block joint 1 includes vertical plate 1-1, connecting plate 1-2 and fixed plate 1-3, fixed plate 1 -3 is integrated with the side of the vertical plate 1-1 near the top through the connecting plate 1-2, and two V blocks are horizontally processed on the vertical plate 1-1, the connecting plate 1-2 and the fixed plate 1-3 Joint screw mounting holes 1-4, tapered through holes 1-5 are processed on the vertical plate 1-1, the center line of each V block joint screw mounting holes 1-4 and the center line of the tapered through holes 1-5 It is arranged vertically, and the other components and connections are the same as those in Embodiment 1.
specific Embodiment approach 3
[0011] Specific implementation mode three: combination Figure 1-Figure 3 Describe this embodiment mode, a kind of spinal minimally invasive surgery robotic grinder drill clamping device described in this embodiment mode, drill clamp seat 2 is processed with fixed plate installation groove 2-5 on the side wall near the top, V block joint 1 passes two A V block joint screw 5 is threadedly installed on the mounting groove 2-5 of the fixed plate, and other compositions and connections are the same as in the second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More