

Unmanned aerial vehicle trapping interception system based on electromagnetic interference and trapping interception method thereof
A technology of electromagnetic interference and interception system, applied in the field of trapping and interception, to achieve the effect of trapping and intercepting accurately
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0040] Embodiment 1, a kind of unmanned aerial vehicle trapping interception system based on electromagnetic interference.
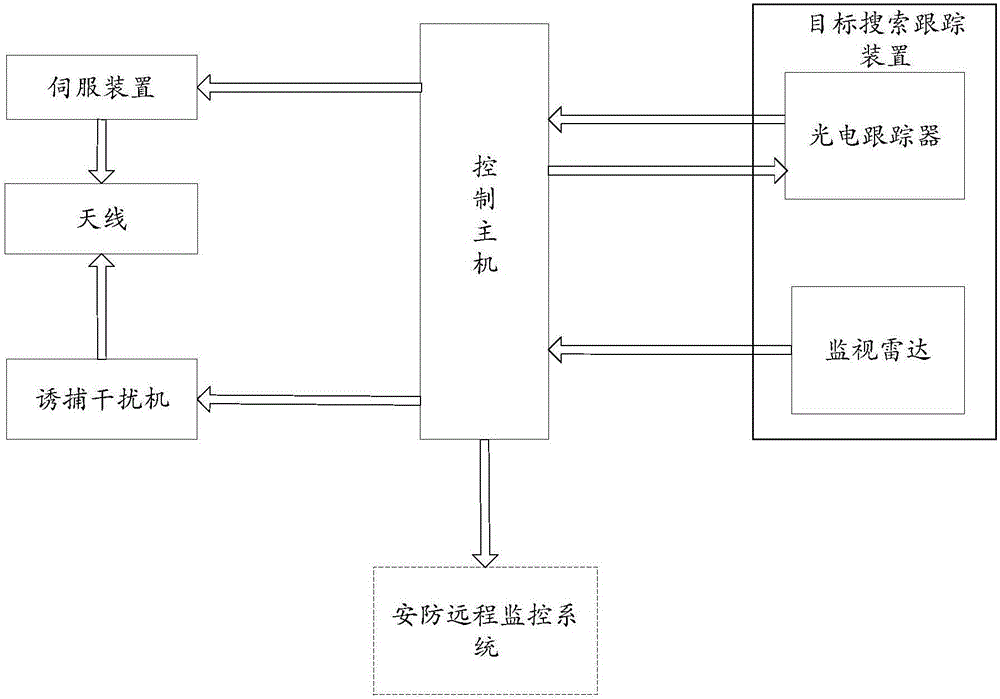
[0041] see figure 1 , the decoy interception system provided in this embodiment includes a control host, a target search and tracking device and a decoy jammer;
[0042] The target search and tracking device is used to detect the position information and video information of suspicious targets in the protected airspace, and send the position information and video information of suspicious targets to the control host;
[0043] The control host is used to judge whether the suspicious target is an unmanned aerial vehicle target according to the video information, and if so, according to the position information of the unmanned aerial vehicle target, the trapping jammer is controlled to transmit electromagnetic interference signals to the unmanned aerial vehicle target, so as to realize the detection of unmanned aerial vehicles. Decoy interception of man-ma...
Embodiment 2
[0067] Embodiment 2, a method for trapping and intercepting drones based on electromagnetic interference.
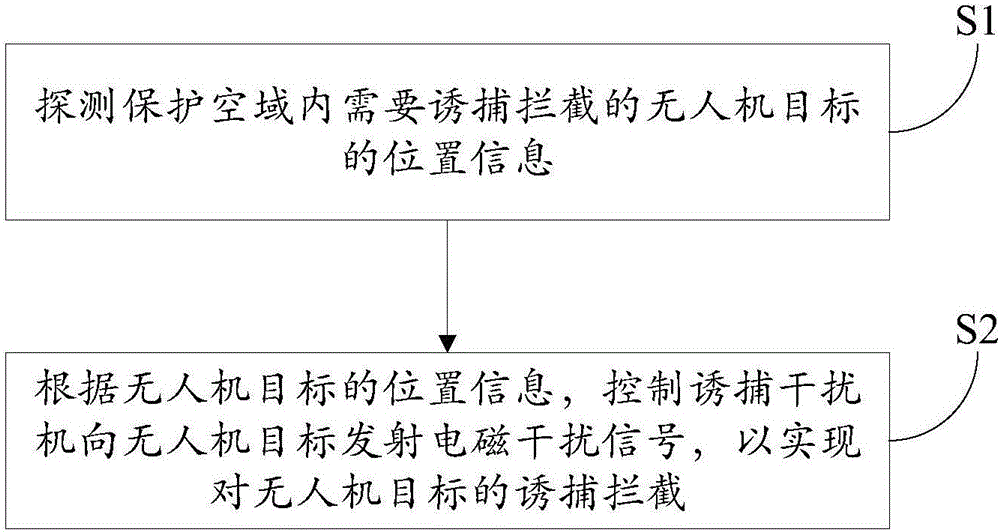
[0068] see figure 2 , the entrapment and interception method provided in this embodiment includes the following steps:
[0069] S1, detecting the location information and video information of suspicious targets in the protected airspace;
[0070] S2, judge whether the suspicious target is a UAV target according to the video information, and if so, control the trapping jammer to emit electromagnetic interference signals to the UAV target according to the position information of the UAV target, so as to realize the trapping of the UAV target intercept.
[0071] The method for trapping and intercepting UAVs provided by this embodiment will be specifically introduced below.
[0072] This embodiment adopts the method of trapping and intercepting drones based on the electromagnetic interference trapping and intercepting system provided in the above-mentioned embodiment 1. ...
Embodiment 3
[0077] Embodiment 3, a method for trapping and intercepting drones based on electromagnetic interference.
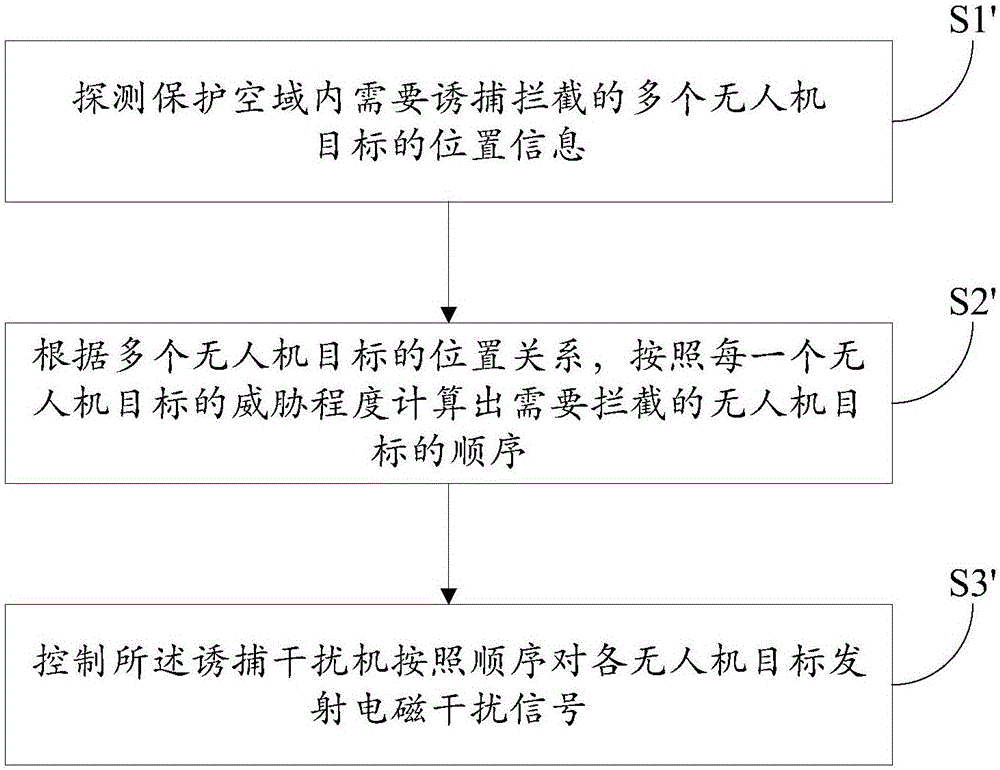
[0078] see image 3 , the method for trapping and intercepting unmanned aerial vehicles provided by the present embodiment includes the following steps:
[0079] S1', detecting the location information and video information of multiple suspicious targets in the protected airspace;
[0080] S2', if it is judged from the video information that there are multiple UAV targets in the suspicious target, then according to the positional relationship of the multiple UAV targets, calculate the UAV to be intercepted according to the threat level of each UAV target the sequence of goals;
[0081] S3', controlling the decoy jammer to transmit electromagnetic interference signals to each drone target in sequence.
[0082] In this embodiment, when calculating the threat level of multiple drone targets, the surveillance radar is the center, and the distance between the drone and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More