

Feature-based fast initialization method for monocular slam
An initialization method and single-purpose technology, applied in the field of SLAM initialization, can solve the problems of slow initialization process and large amount of calculation, and achieve the effect of speeding up and reducing the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described below.
[0041] A feature-based fast initialization method for monocular SLAM, comprising the following steps:
[0042] 1) Start SLAM and obtain the first frame of pictures, and extract ORB feature points P(x,y) from the pictures.
[0043] ORB (Oriented FAST and Rotated BRIEF, oriented to fast rotation invariance algorithm) is a fast feature point extraction and description algorithm, which has rotation invariance and good anti-noise ability. The main direction of feature points is through the moment ( moment) is calculated, that is to say, the centroid of the feature point within the radius of r is calculated through the moment, and the coordinates of the feature point to the centroid form a vector as the direction of the feature point.
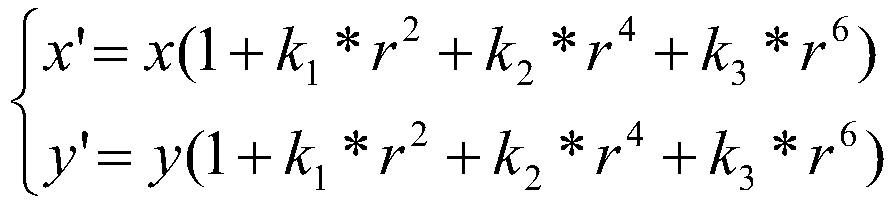
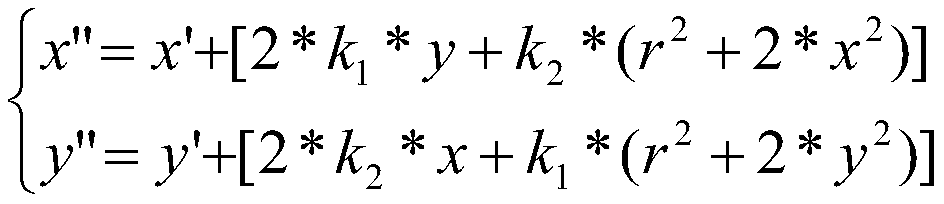
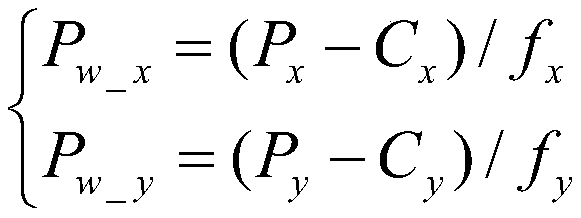
[0044] 2) Perform image dedistortion on P(x,y)
[0045] The process of camera imaging is essentially the conversion of several coordinate systems. First, a point in space is converted ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More