

Mapping system based on laser navigation substation patrol robot as well as method
An inspection robot and laser navigation technology, applied in the field of mapping systems, can solve the problems of time-consuming data collection, large cumulative errors in substation maps, and high costs, and achieve the effects of reducing manpower consumption, eliminating cumulative errors, and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
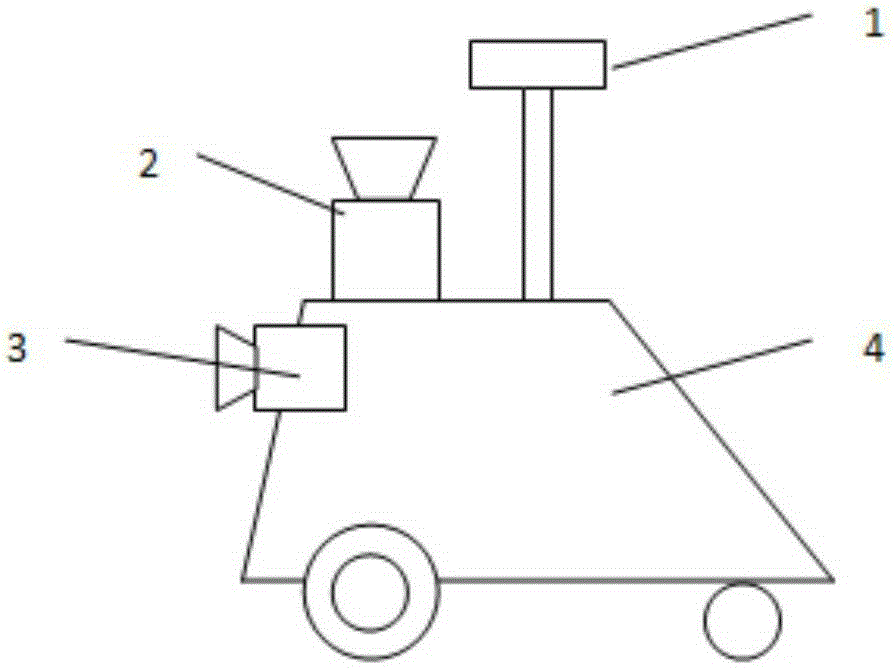
[0037] Such as figure 1 As shown, the substation mapping method of laser navigation substation inspection robot's GPS, vision and laser radar, which includes a substation inspection robot equipped with laser radar, the robot is equipped with industrial computer, GPS module, vision module and laser radar .
[0038] The substation inspection robot equipped with laser radar has the function of remote control driving.
[0039] The GPS module is linked with the industrial computer through the RS232 interface.
[0040] The vision module and laser radar are connected with the industrial computer through the LAN interface.
[0041] When the substation inspection robot using laser navigation is building a map, the laser navigation substation inspection robot needs to drive in the required mapping area. At this time, GPS, vision module and laser radar will col...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More