Automatic anti-collision passage gate machine and control method thereof
A control method and technology of access gates, which are applied in the directions of roads, roads, traffic restrictions, etc., can solve the problems of positioning overshoot, jitter, noise, etc., and achieve the effect of smooth operation of the gate and low noise.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
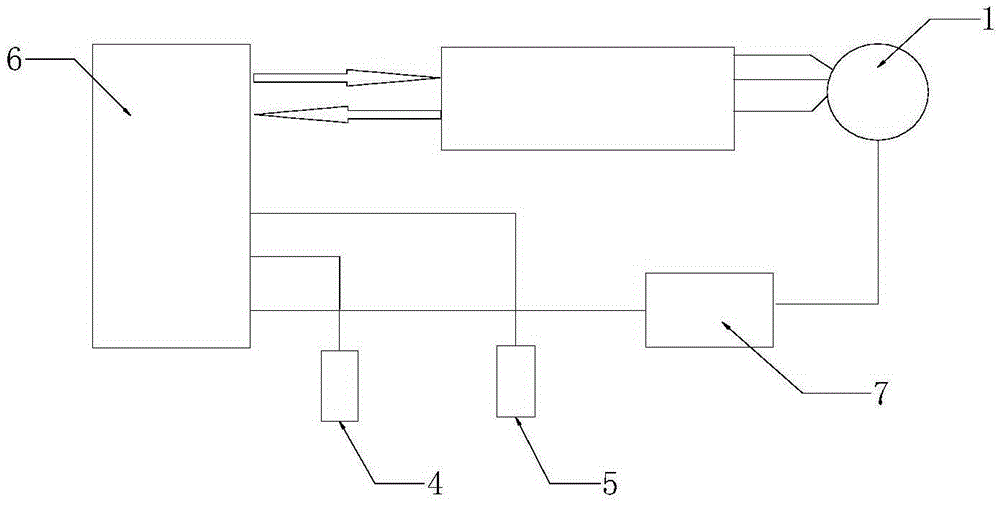
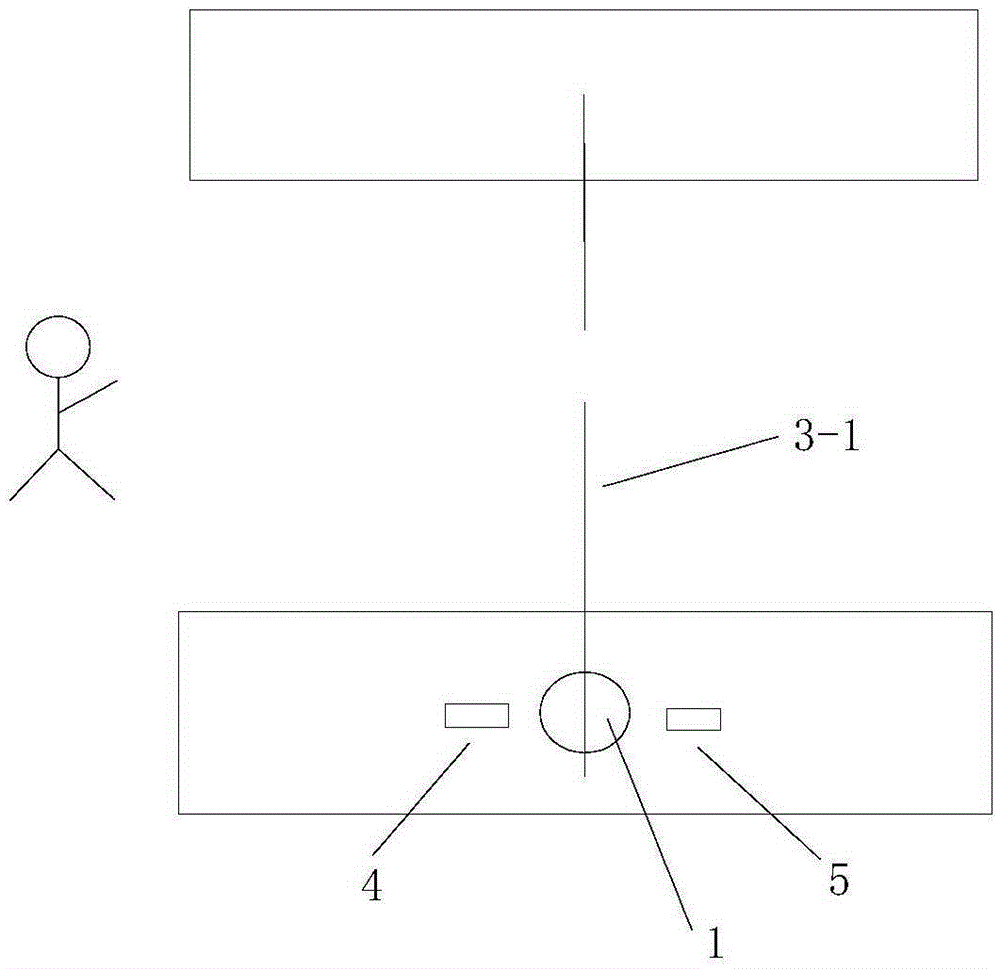
[0050] Such as figure 1 As shown, it includes a gate and a brushless DC motor 1 with a Hall sensor installed in the gate, and a brushless DC motor with a Hall sensor is also provided in the gate for driving and current control. The CPU6 of the Hall sensor brushless DC motor, a current detection device 7 is also arranged between the CPU6 and the Hall sensor brushless DC motor; A sensor 4 and B sensor 5 are also arranged in the gate, and the A, B The sensors are respectively connected to the CPU6; when the power is initially turned on, the brushless DC motor 1 is driven to rotate, and the signal returned by the Hall sensor of the motor is analyzed to convert the coordinate value, and the brushless DC motor 1 drives the swing arm 3-1 to rotate, When the swing arm 3-1 rotated to the A sensor 4, the CPU recorded this point as 0 coordinate value, and used this point as the position point for opening the door in this direction. Then the motor rotates in reverse, and after the swing ...
Embodiment 2
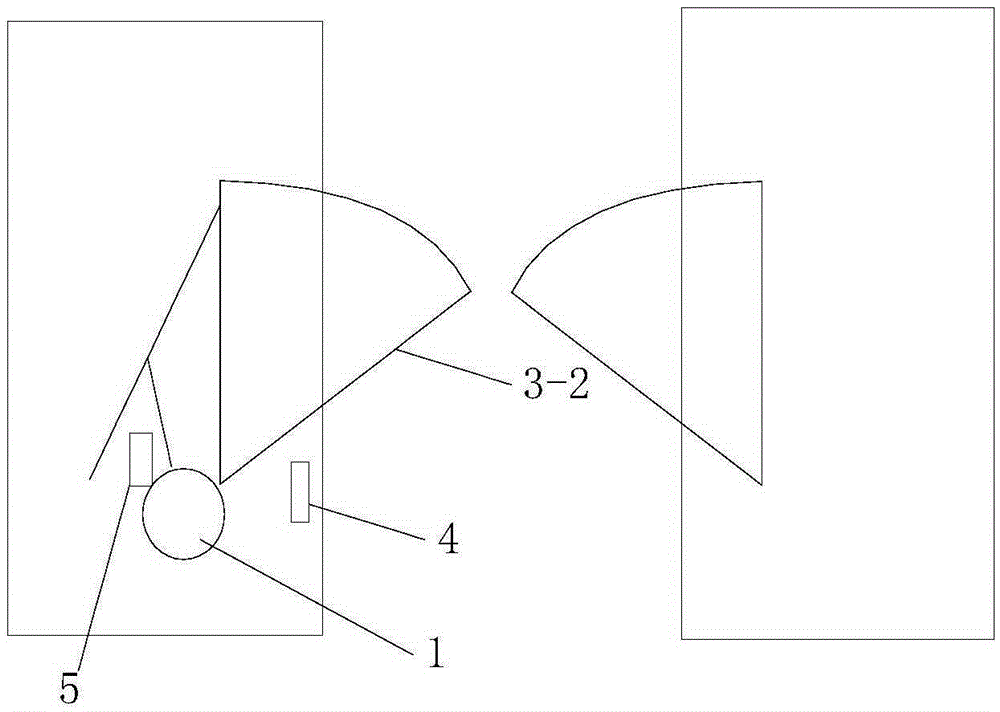
[0054] When the power is initially turned on, the brushless DC motor 1 is driven to rotate, and the signal returned by the motor Hall sensor is analyzed to convert the coordinate value. The brushless DC motor drives the rocker device, and the rocker device then pushes the wing 3-2 to move. When the wing 3-2 touches the B sensor 5, the CPU takes the signal of the B sensor 5, records the current position as the coordinate 0, and records it as the door opening coordinate, and then drives the motor to reverse, and when the wing touches the A sensor 4, it stops , the CPU records the current point as the door closing coordinates.
[0055] When the wing 3-2 catches a person or something by accident during closing the door, the CPU judges that there is an accident by detecting the change of the current, and at this moment reverses to open the door. Effectively prevent injury or damage to machinery.
[0056] In normal operation, according to the stroke (coordinate value), the motor ca...
Embodiment 3
[0059] When the power is initially turned on, the brushless DC motor 1 is driven to rotate, and the signal returned by the motor Hall sensor is analyzed to convert the coordinate value, and the brushless DC motor is brought to the turntable 3-3 to rotate. When the protrusion on the turntable 3-3 When the A sensor 4 has a signal, the CPU records this point as 0 coordinates. After several laps of operation, the system calculates the number of steps in each lap, and divides the number of steps into thirds (in the cross gate, it is quartered) to obtain Figure out the travel each rod (roller) will move during normal operation. Set the coordinates of the initial rod (roller) through the system (the system will save it, no need to set it next time), and it can work normally.
[0060] When there is an illegal push rod (collision), the CPU detects the change of the coordinate value, and according to the direction of the change, a reverse rotational torque is applied to the motor to pre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More