

Gait rehabilitation robot and method for controlling gait rehabilitation robot
A rehabilitation robot and control method technology, applied in the field of medical devices, can solve the problem that a gait rehabilitation robot cannot adjust its own motion, etc., and achieve the effects of good human-computer interaction, avoiding secondary injury and easy promotion.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described below in conjunction with accompanying drawings, because it is convenient to understand better. The following embodiments of the present invention are only used to provide a preferred mode, but the technical features can be combined with each other on the premise of not conflicting with each other, which does not constitute a limit to the protection scope of the present invention.
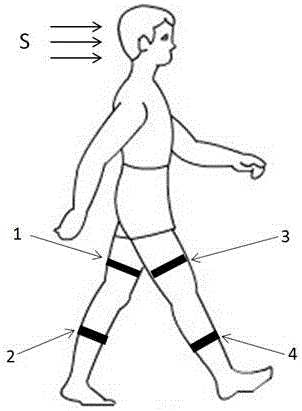
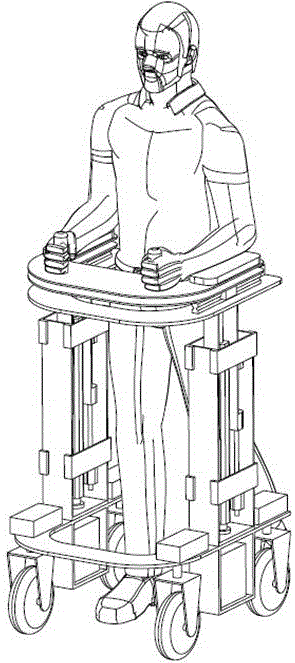
[0043] The gait rehabilitation robot in the present invention is a wheeled mobile robot, please refer to image 3 , including a robot body, a driving wheel, a control unit and a wearable sensor, the wearable sensor is wired or wirelessly connected to the control unit, and the wearable sensor is used to detect the gait event of the user's foot landing when walking, and measure the result in real time Describe the posture angle and angular velocity of the user's thigh and calf in the sagittal plane when standing, and calculate the user's walking ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More