

A Direct Error Compensation Technology for Five Degrees of Freedom Hybrid Robot
An error compensation and robotics technology, applied in the field of robotics, can solve problems such as excessive parameterization of models, deviation of error identification results from the true value, complex models, etc., and achieve the effects of simple calculation methods, avoiding long time-consuming, and high calculation efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0046] This embodiment is directed to a direct error compensation technology for a five-degree-of-freedom hybrid robot with a rotating bracket disclosed in Chinese patent publication No. CN104985596A.
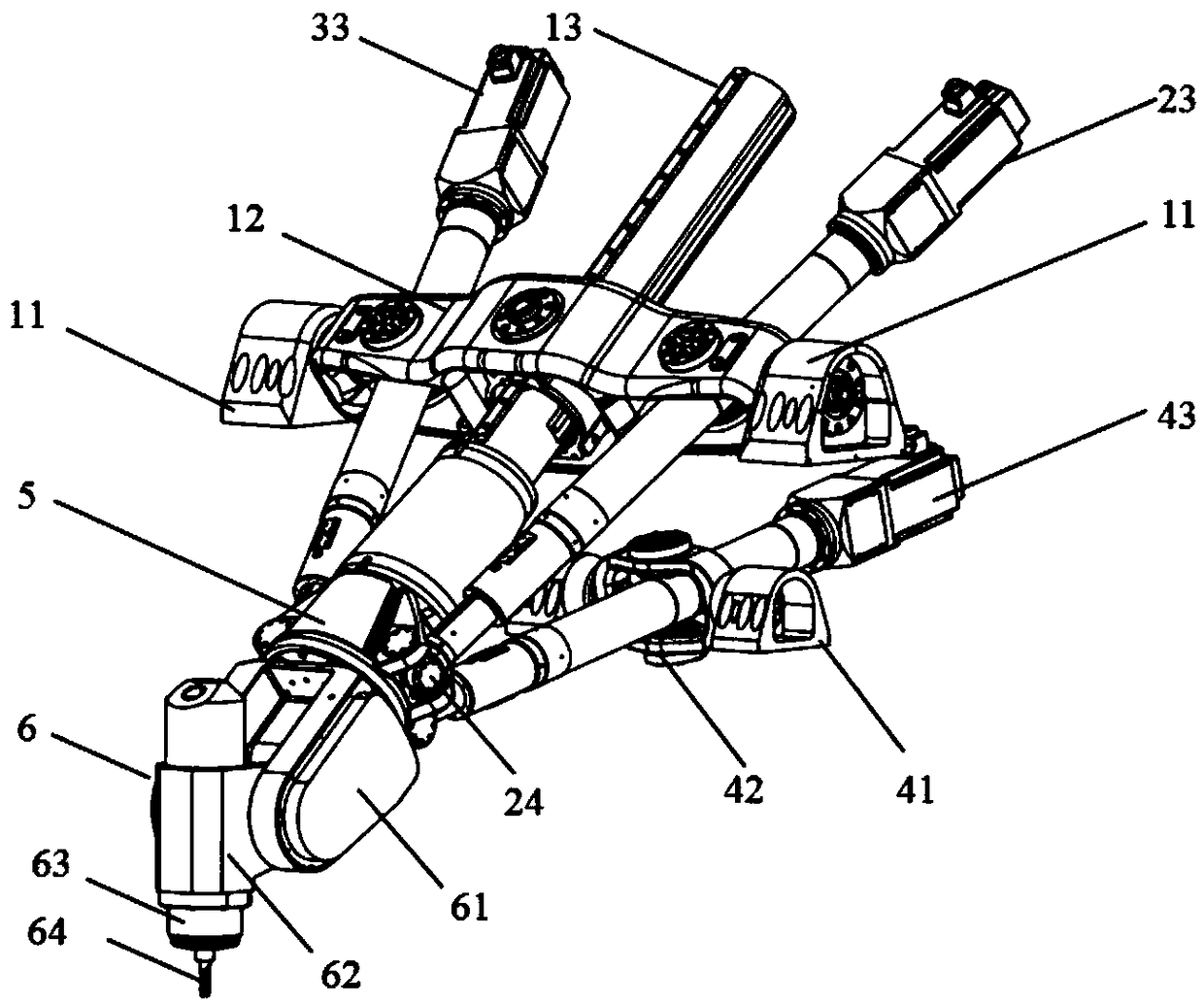
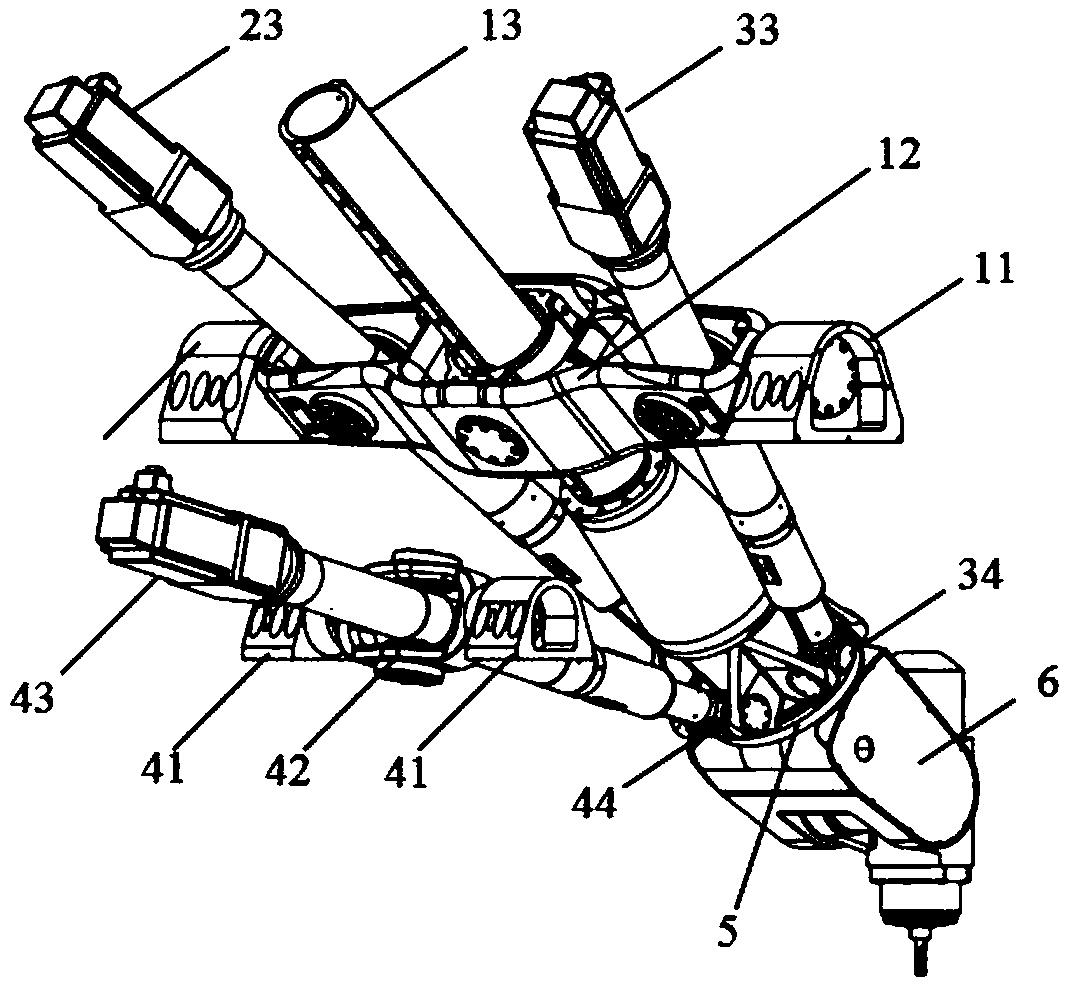
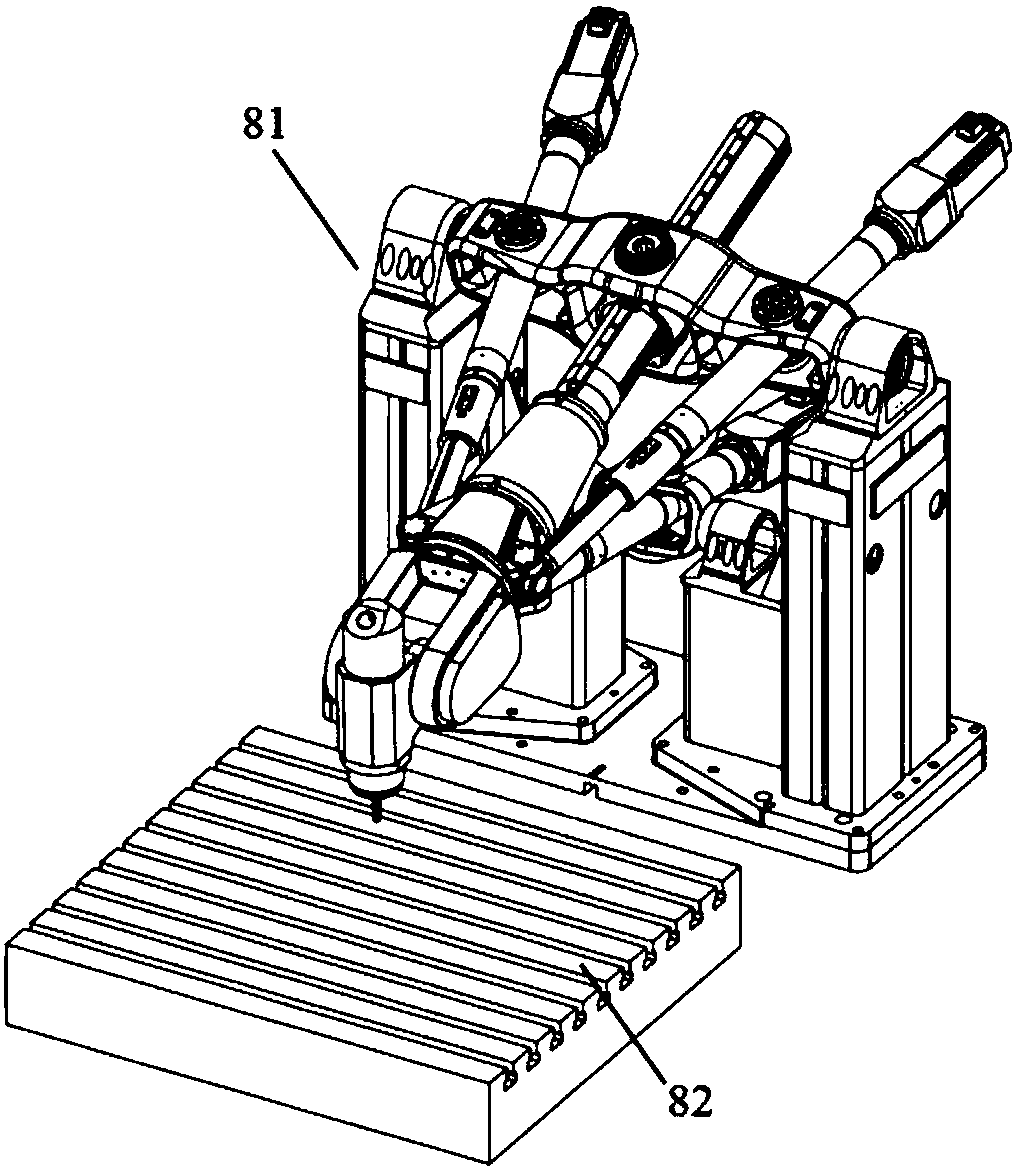
[0047] Attached below figure 1 And attached figure 2 The structure of the five-degree-of-freedom hybrid configuration equipment disclosed in CN104985596A is briefly described. The five-degree-of-freedom hybrid configuration equipment consists of a three-degree-of-freedom parallel mechanism with one translation and two rotations and a series-connected rotor with two rotational degrees of freedom connected in series. The series-connected rotor 6 is fixed on The moving platform of the parallel mechanism. The tandem rotary head 6 connected in series at the end of the moving platform 5 is a two-degree-of-freedom A / C swing head, including a firs...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More