

Four-degree-of-freedom parallel mechanism added with branched chain seats for rotation
A technology of rotating mechanism and degree of freedom, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc. It can solve the problems of small working space, less degrees of freedom, and poor stiffness of the mechanism, and achieve the effect of improving motion performance, stiffness, and stable performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] combine Figure 1-6 The specific embodiment of the present invention is further described:
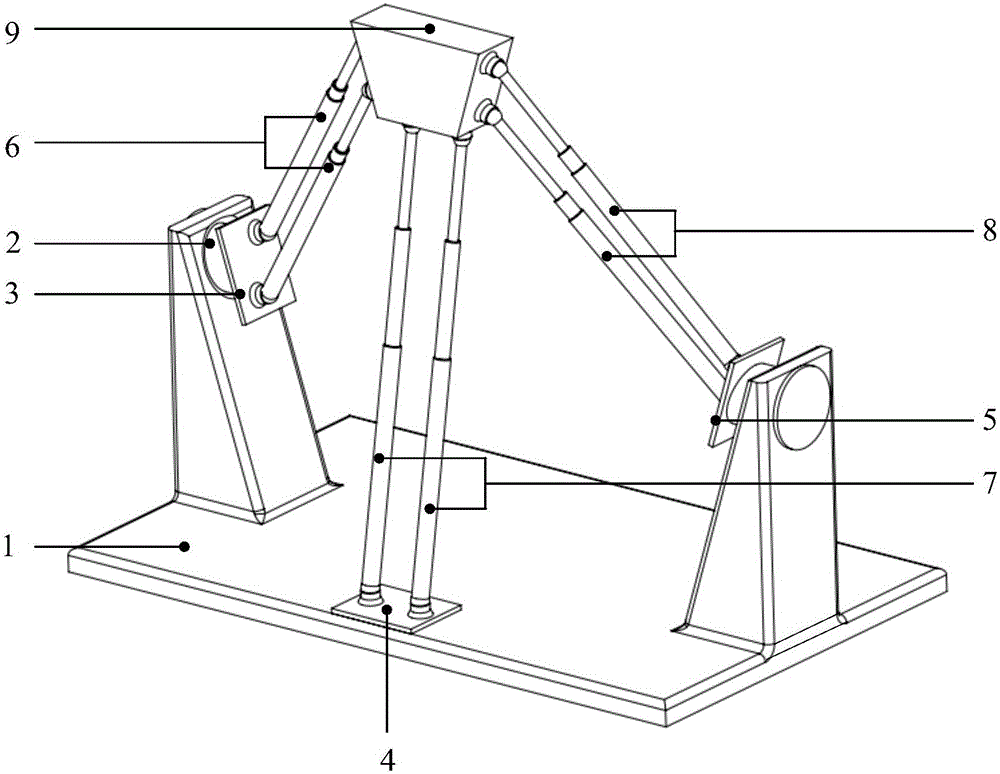
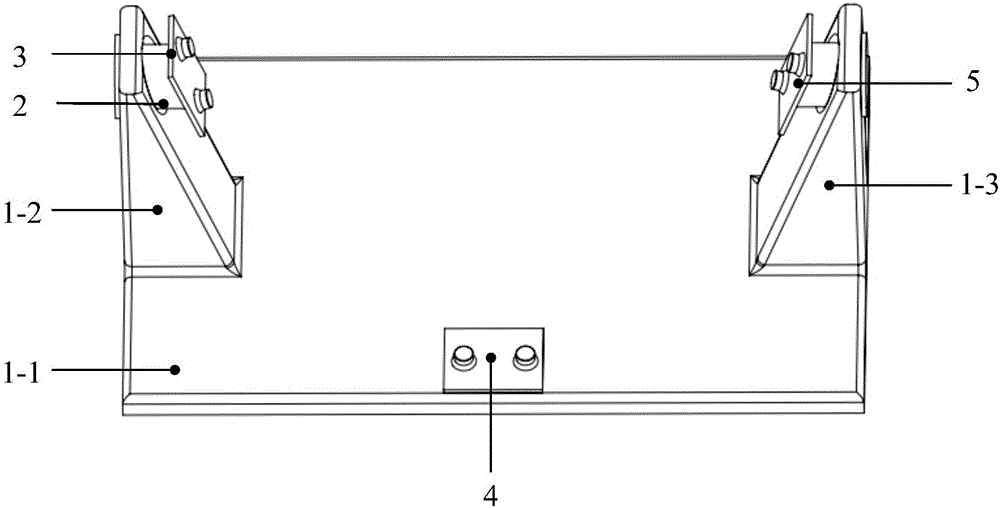
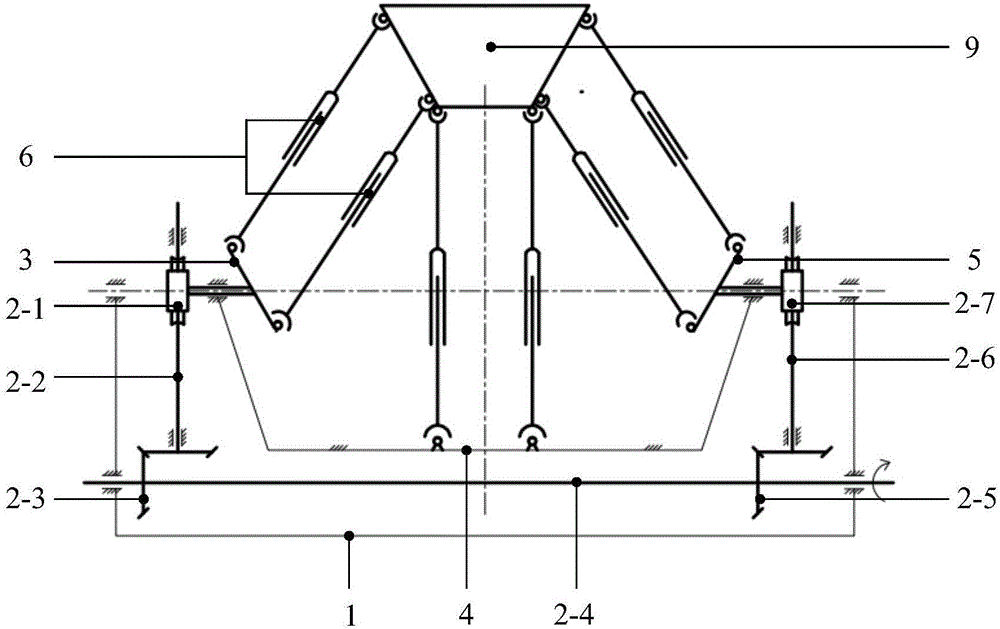
[0021] combine figure 1 , a four-degree-of-freedom parallel mechanism with additional branch chain seat rotation, including a frame 1, a rotating mechanism 2, a first branch chain seat 3, a second branch chain seat 4, a third branch chain seat 5, and a first branch chain group 6. The second branch chain group 7, the third branch chain group 8, and the moving platform 9; the frame 1 includes a base 1-1, a first column 1-2, and a second column 1-3; the first column 1-2. The second column 1-3 is fixed at both ends of the base 1-1;
[0022] The rotating mechanism 2 is installed inside the frame 1, and is used to drive the first chain branch seat 3 and the third chain branch seat 5 to rotate synchronously; the first chain branch seat 3 and the third chain branch seat 5 are respectively connected with the first The rotating mechanism 2 in the column 1-2 and the second column 1-3 is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More