

Omnidirectional moving chassis and leveling method thereof
An omnidirectional movement and chassis technology, applied in the direction of motor vehicles, suspensions, vehicle springs, etc., can solve the problems of inconsistent program output paths, inability to achieve precise movement, and unequal combined speed direction, etc., achieving good effects and low cost , The effect of the same friction force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
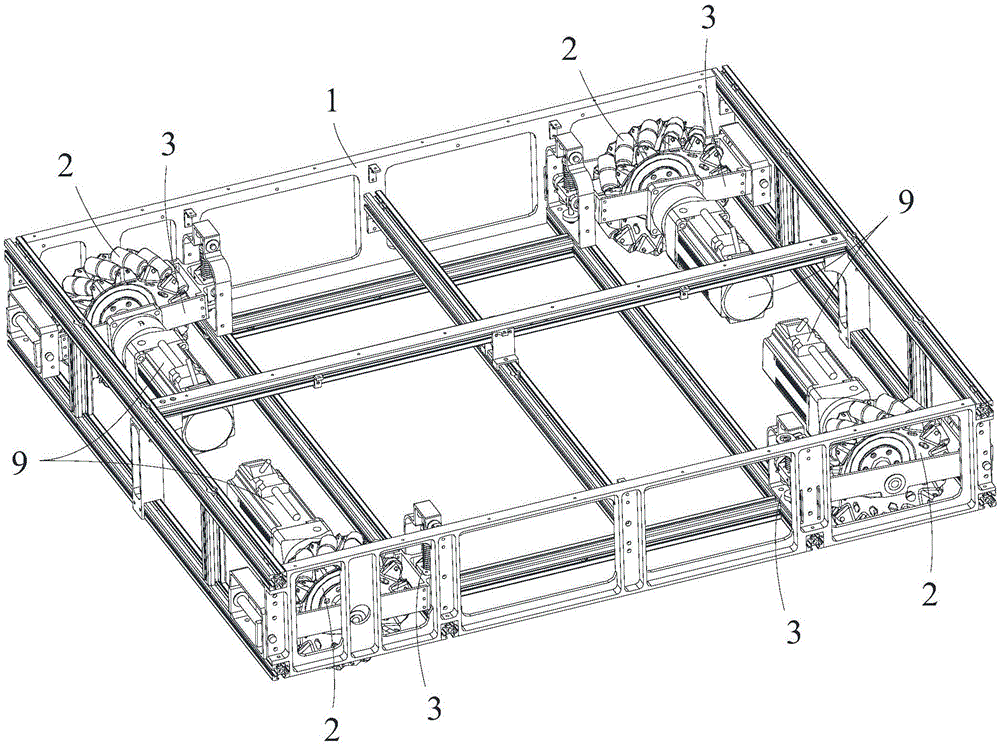
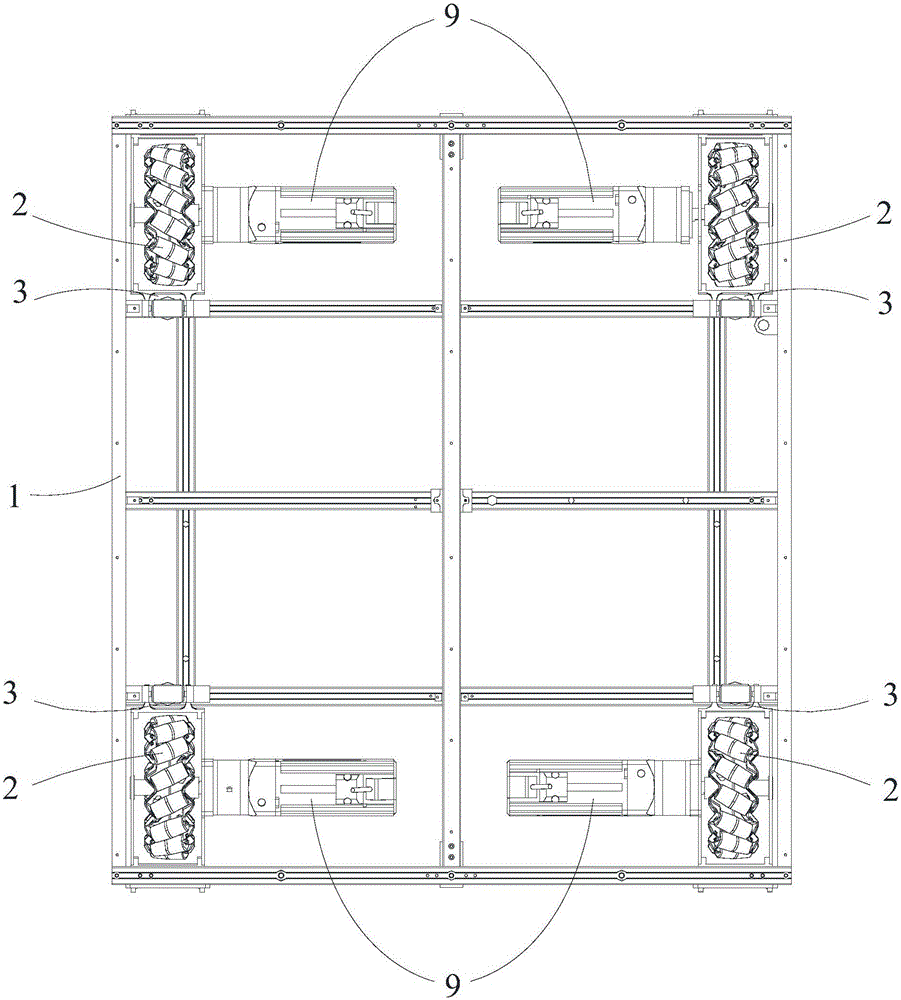
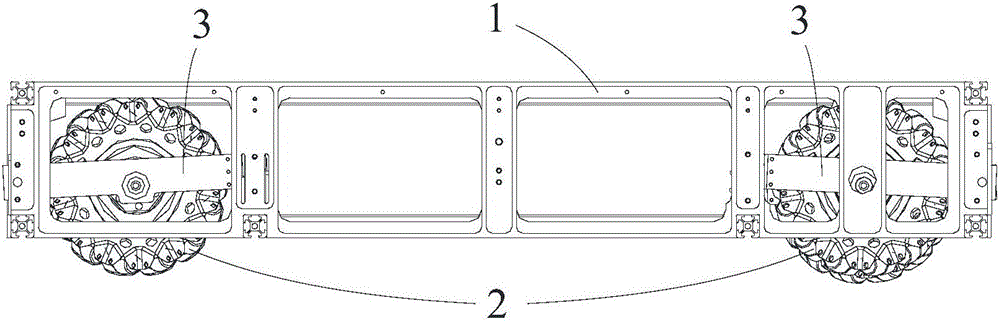
[0048] Such as Figure 1-5 As shown, the omnidirectional mobile chassis of the present invention includes a frame 1, a drive system and a control system.
[0049] Such as Figure 1-3 As shown, the frame 1 is a cuboid frame structure, and its four bottom corners are respectively provided with an adjustment part 3, a bracket 4 and an omnidirectional wheel 2, and each omnidirectional wheel 2 is connected to the corresponding bracket 4. Each of the adjustment parts 3 includes a bolt 5, a nut 51, a nut 2 52, a slider 6, a spring 7 and a buffer pad 8, such as Figure 5 As shown, the bolt 5 is a stepped bolt, one end of which is provided with a shaft hole, the shaft hole is adapted to the shaft, the shaft is connected to the frame 1, and the bolt body at one end of the shaft hole is provided with an M6 outer thread, the middle is a smooth section, its diameter is 5mm, and the other end of the bolt body is provided with an M5 external thread, the nut one 51 is an M6 nut, the nut two...
Embodiment 2
[0055] Such as Figure 1-6 As shown, the leveling method of the omnidirectional mobile chassis of the present invention, the application of the omnidirectional mobile chassis as described in Embodiment 1 includes the following steps:
[0056] A, an electronic scale is set under each of the omnidirectional wheels 2;
[0057] B. Screw the nut one 51 on each of the adjustment parts 3 to make the corresponding omnidirectional wheel 2 move vertically up and down;
[0058] C. Read the positive pressure value of the corresponding omnidirectional wheel 2 on each of the electronic scales;
[0059] D. Adjust each nut one 51 until all positive pressure values are consistent or within the allowable error range;
[0060] E. Make the chassis suspended, all the omnidirectional wheels 2 off the ground, each of the springs 7 returns to the free state length, screw the nut 2 52 on each of the adjustment parts 3, and drive the buffer pad 8 to move, so that the buffer pad 8 contacts the slid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More