

Robot for searching for and fishing physical evidence in deep water environment
A robot and environmental technology, applied to ship salvage, manipulators, underwater operation equipment, etc., can solve problems such as low efficiency, high cost, and inability to move freely and quickly, and achieve the goal of emphasizing practicability, strong salvage ability, and strong observation ability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
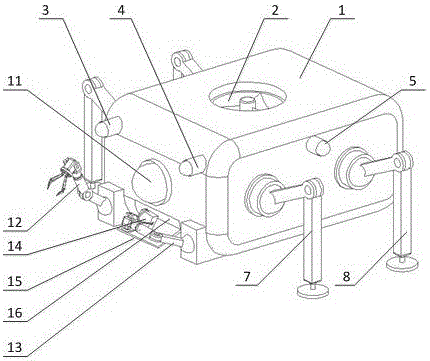
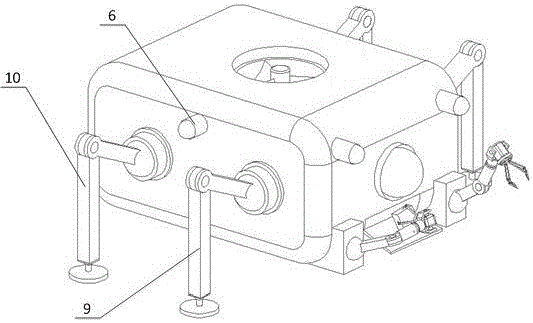
[0033] Embodiment 1: as Figure 1-6 As shown, the present invention proposes a deep-water environmental evidence search and salvage robot comprising: a robot trunk 1, a floating propeller 2, a first LED light 3, a second LED light 4, a third LED light 5, a fourth LED light 6, a first Mechanical leg 7, second mechanical leg 8, third mechanical leg 9, fourth mechanical leg 10, wide-angle camera 11, first manipulator 12, second manipulator 13, storage bin 16, water surface monitor 37, water surface controller 38 , surface power supply 39, umbilical cord 40, underwater controller 41, robot internal power supply 42. Wherein, the robot torso 1 is the main body of the robot. Floating propeller 2 is positioned at the upper middle part of robot torso 1. The first LED light 3 is located on the upper right side of the robot head, the second LED light 4 is located on the left side of the upper end of the robot head, the third LED light 5 is located above the left side of the robot, and ...
Embodiment 2
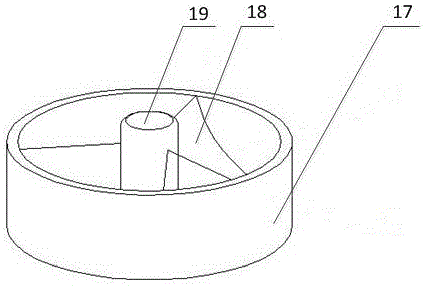
[0037] Embodiment 2: the remainder of this embodiment is the same as the previous embodiment, wherein: as image 3 As shown, the floating propeller 2 includes a propeller housing 17 , a propeller blade 18 and a central shaft 19 , the central shaft 19 is located at the very center of the propeller housing 17 , and the propeller blade 18 is fixed on the central shaft 19 . Utilize the rising buoyancy generated by the clockwise rotation of the buoyant propeller 2, and the downward thrust generated by the counterclockwise rotation to realize the rapid ascension and diving purposes of the robot.
Embodiment 3
[0038] Embodiment 3: the remainder of this embodiment is the same as the previous embodiment, wherein: as Figure 4 As shown, the manipulator includes a manipulator support 20, a manipulator 22. Mechanical arm 24. Hukou mechanical arm 26. Mechanical claw, the mechanical arm 22 is fixed on the manipulator support 20 by the manipulator spherical pair 21, and the manipulator arm 24 One end connects the pin through the manipulator 23 with robotic arm 22 is connected, and the other end is connected with the tiger's mouth mechanical arm 26 by coupling 25, and the tiger's mouth mechanical arm 26 is connected with mechanical claw.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More