

Helicopter control loading simulator having touch guidance
A technology for helicopter simulation and load simulation, which is applied to simulation devices, simulators, educational appliances and other directions of space navigation conditions, which can solve problems such as operational force conflicts, a sense of frustration, and the inability to directly and quickly detect pilots' manual operational force. , to achieve the effect of improving maneuverability and reducing structural complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
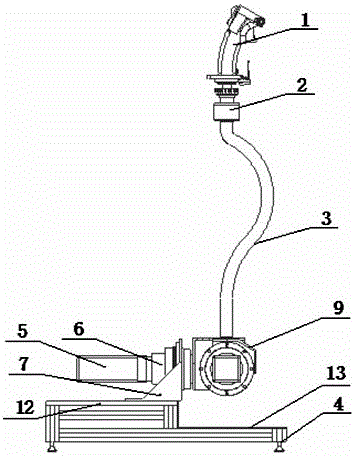
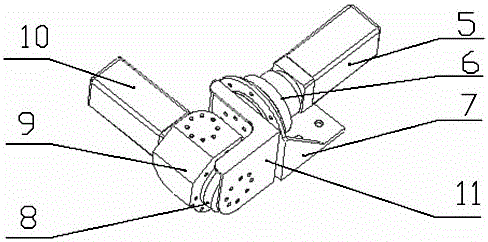
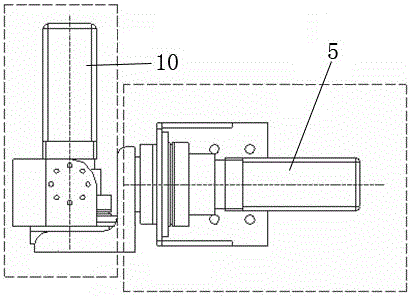
[0016] The present invention will be further explained below in conjunction with the drawings: Figure 1-4 As shown, a helicopter simulation control load simulation device with tactile guidance is composed of a control handle 1, a 6-dimensional force sensor 2, a control lever 3, a platform base 4, a lateral movement servo motor 5, and a lateral movement disc reducer 6. , Fixed base 7, longitudinal motion disc reducer 8, joystick base 9, longitudinal motion servo motor 10, rotating bracket 11, table top plate 12, table top bottom plate 13, characterized by: table top base 4 is composed of the lower bottom plate 13 of the countertop base and the countertop 12 of the countertop base. The top surface of the lower bottom plate 13 of the countertop base is fixedly connected to the countertop base and countertop 12, and the fixed base 7 is fixedly connected to the top surface of the countertop base and countertop 12. The lateral motion servo motor 5 is fixedly connected to the table p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More