

Mobile robot navigation control method based on laser data
A mobile robot and control method technology, applied in two-dimensional position/channel control, non-electric variable control, control/regulation system, etc., can solve the problems of inflexible robot operation routes, heavy workload, and complex ground construction. Achieve the effect of low cost, accurate navigation control and simple operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0041] The present invention will be further elaborated below in conjunction with the accompanying drawings and specific embodiments, so as to better understand the present invention. The technical features of the present invention can be combined with each other if there is no conflict.
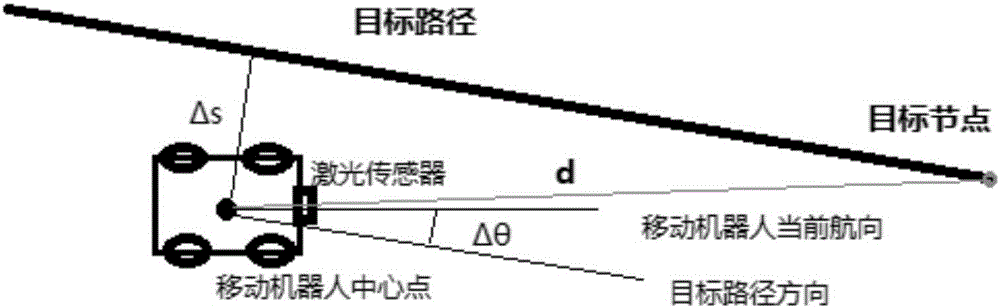
[0042] In this embodiment, the mobile robot is not limited in structure and type, but the left wheel and right wheel used for driving need to be able to adjust the wheel speed respectively. Its front end is equipped with a laser sensor for scanning the surrounding environment, and the connection line between the center of the laser sensor and the center point of the mobile robot is consistent with the direction of travel of the robot.
[0043] A navigation control method for a mobile robot based on laser data, comprising the following steps and sub-steps:
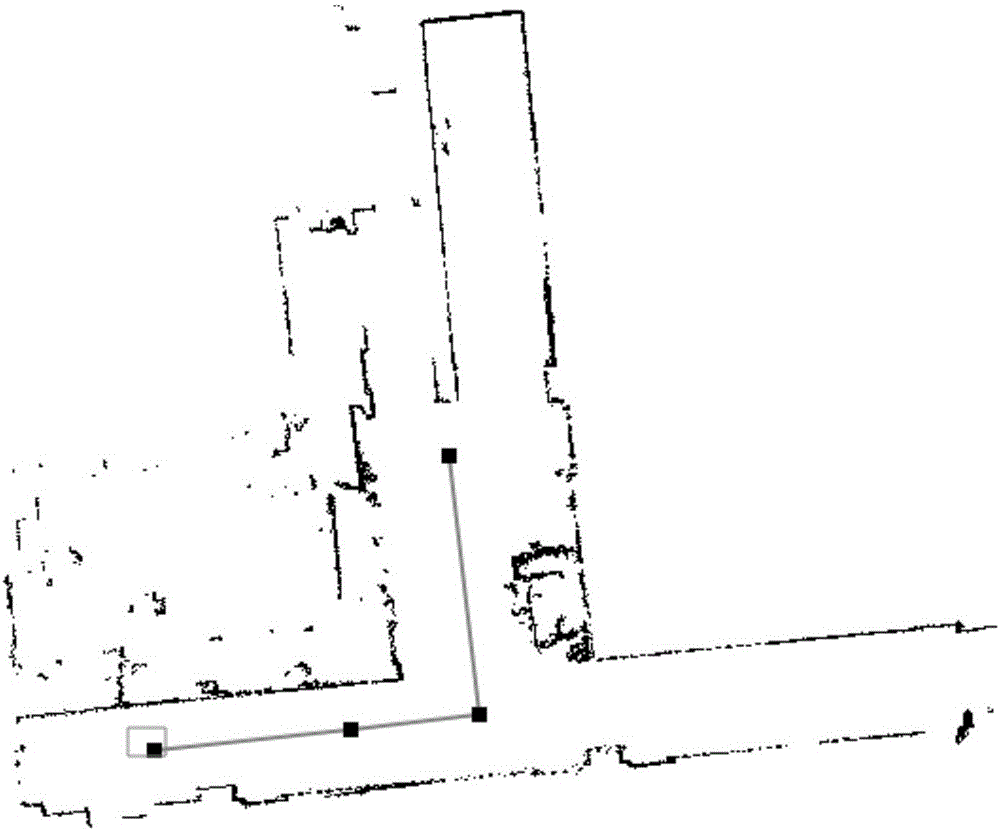
[0044] Step 1: Add and set the path in the global map, specific sub-steps:
[0045] Step 1.1: First build a client for controlling the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More