

A Method of Creating Point Cloud Maps for Mobile Robots Based on Laser Data
A mobile robot, map creation technology, applied in the direction of navigation calculation tools, etc., can solve the problem of low matching speed matching accuracy, and achieve the effect of multiple creation and rapid update, simple operation and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention will be further elaborated below in conjunction with the accompanying drawings and specific embodiments, so as to better understand the present invention. The technical features of the present invention can be combined with each other if there is no conflict.
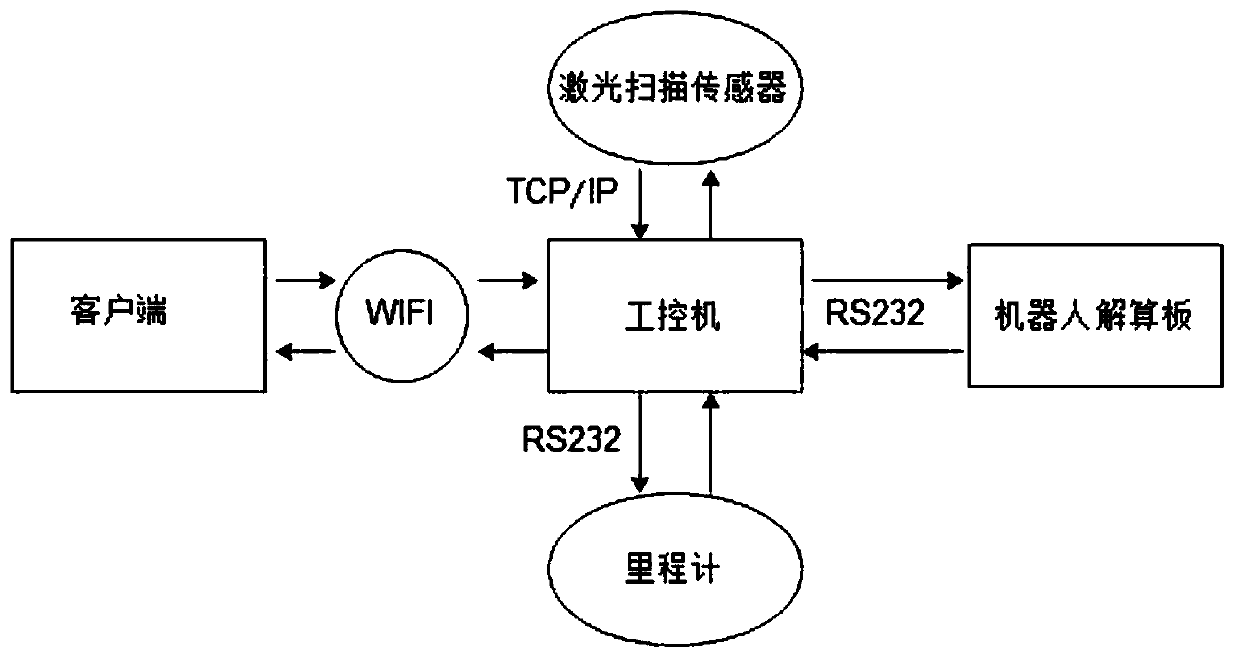
[0045] like figure 1 As shown, the mobile robot of the present invention has a built-in industrial computer, a calculation board, a laser sensor and an odometer, and the industrial computer and the calculation board communicate through the RS232 serial port. The industrial computer communicates remotely with the client through wifi. The client can be implemented in the form of PC, server, etc.
[0046] In this embodiment, the method for creating a point cloud map of a mobile robot based on laser data includes the following steps and sub-steps:
[0047] Step 1: Establish real-time communication and data transmission between the mobile robot and the client. Specific sub-steps:
[0048] St...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More