Rope-driving elbow-wrist rehabilitation robot
A rehabilitation robot and rope-driven technology, used in passive exercise equipment, physical therapy and other directions, can solve the problems of large inertial impact, single function, heavy weight, etc., and achieve the effect of small movement impact, comfort, and small inertial impact.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] Specific examples of the present invention are given below. The specific embodiments are only used to further describe the present invention in detail, and do not limit the protection scope of the claims of the present application.
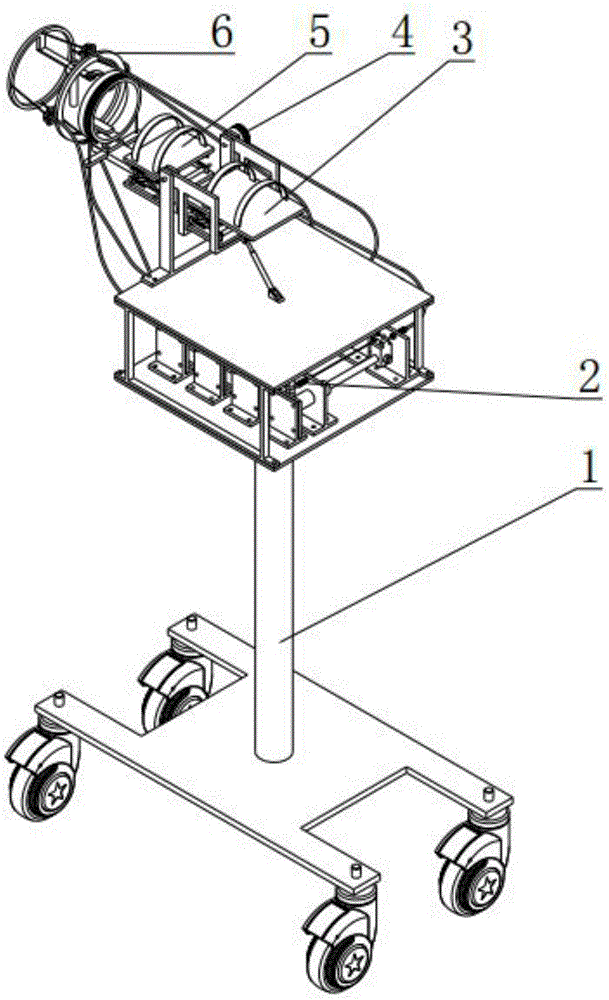
[0029] The invention provides a rope-driven elbow-wrist rehabilitation robot (rehabilitation robot for short, see Figure 1-10 ), including mobile support system 1, drive system 2, big arm support system 3, elbow training system 4, forearm support system 5 and wrist training system 6; described drive system 2 and big arm support system 3 are all installed on On the mobile support system 1; the big arm support system 3 is connected with the forearm support system 5 through the elbow training system 4; the wrist training system 6 is installed on the forearm support system 5;
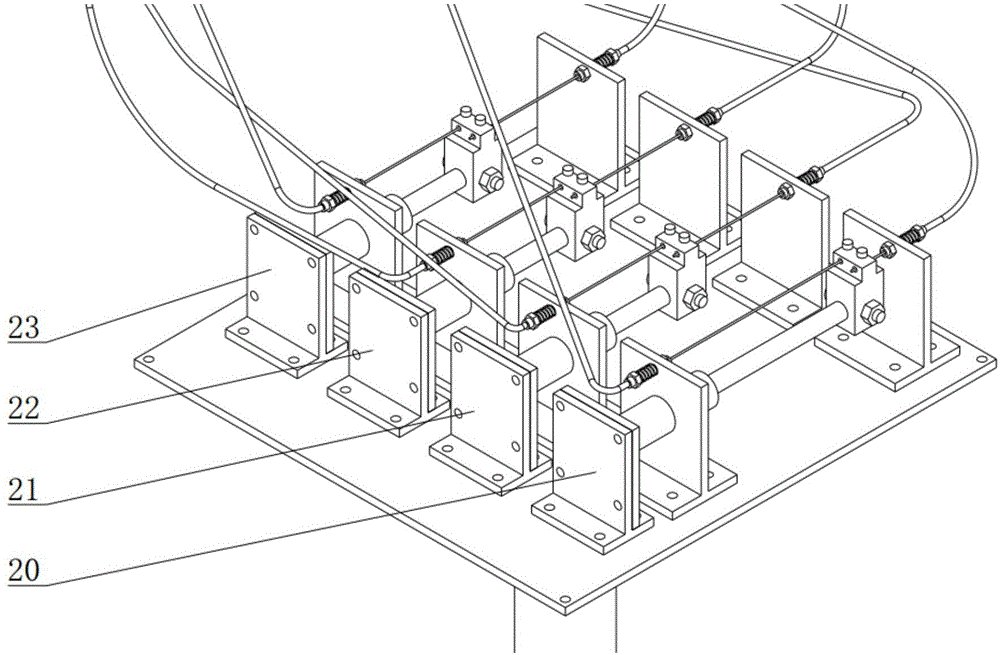
[0030] The drive system 2 (see figure 2 ) includes the elbow drive module 20, the first wrist drive module 21, the second wrist drive module 22 and the third wrist d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More