

Full-breadth airplane runway sweeping machine
An airstrip and full-format technology, applied in the field of sanitation vehicles, can solve problems such as flight delays, cancellations, safety hazards in production safety, etc., and achieve high transmission capacity, thorough cleaning, and the effect of preventing take-off safety accidents
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
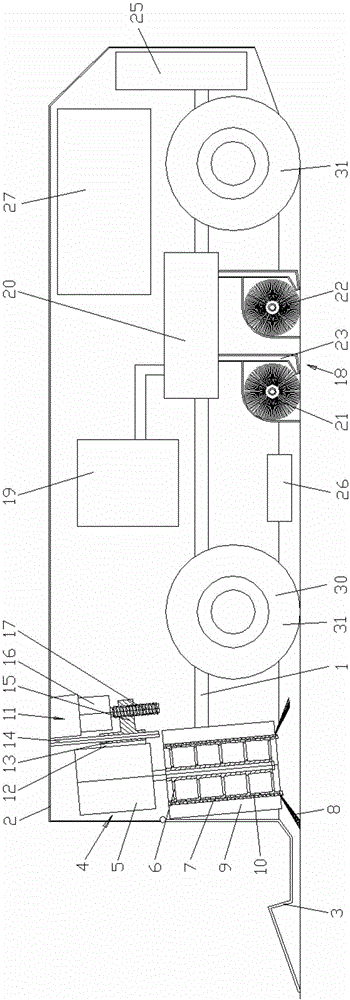
[0027] Embodiment 1, all-wheel steering mode: wherein all the traveling axles 31 adopt an independent steering structure 35, the traveling axles 31 are arranged in two rows at the front and back, and the traveling axles 31 are respectively connected to the vehicle frame 1 through elastic suspension. Preferably, generally only need to configure motor deceleration braking device 34 to part of walking wheel shaft 31, i.e. wheel side motor, speed reducer and braking device, form driving wheel shaft 32, other walking wheel shaft 31 is driven wheel shaft 33, promptly does not have power and Braking device.
Embodiment approach 2
[0028] Embodiment 2, universal wheel mode with servo guiding mechanism: all the traveling wheel shafts 31 are arranged in two rows, the front row traveling wheel shafts 31 have no steering structure 35, the rear row traveling wheel shafts 31 use universal wheels, and the traveling wheel shafts 31 are all suspended by elastic Connected with the vehicle frame 1, all or part of the front wheel shaft 31 is provided with a motor deceleration brake device 34, which is driven by the wheel side motor through a reducer to form a driving wheel shaft 32, and the universal wheel in the rear row is a driven wheel shaft 33 ,No power. Considering the reversing and steering of the sweeper, there is an electric semi-active direction selection mechanism on the bracket of the universal wheel to prevent it from dying when reversing suddenly.
Embodiment approach 3
[0029] Embodiment 3, traditional way: all walking axles 31 are arranged in two rows, wherein one row is the driving axle 32 of torque drive mode, without steering mechanism, all or part of walking axles 31 are provided with motor deceleration braking device 34, That is, the driving wheel shaft 32 driven by the wheel motor and the reducer; the other row is the driven wheel shaft 33, and all the driven wheel shafts 33 are provided with an independent servo motor-type steering structure 35; connected.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More