

Active disturbance rejection control robust guaranteed cost design and parameter setting method
A technology of active disturbance rejection control and parameter tuning, which is applied to electric controllers, controllers with specific characteristics, etc., and can solve the problems of difficult work and huge design calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0114] Embodiment 1: The following is a numerical application example of the present invention, which is illustrated for a simulation example of an uncertain system, and the steps are as follows:
[0115] 1. State space model of uncertain linear system
[0116] Consider the following uncertain system:
[0117]
[0118] where A o =[0,1;-80,-20],B o = [0; 2.14], C o = [1; 0], M = [0.3, 0; 0, 1], E(t) = [sin5t, 0; 0, sin5t], N 0 =[0,0;0,0],N 1 =[0.2;-1.2]. At this time, the system is a second-order object, and the transfer function of the uncertain system is:
[0119]
[0120] It should be pointed out that, under the uncertainty condition in this example, when a>0 is the minimum phase system, and when a<0 is the non-minimum phase system.
[0121] 2. Establish a full-dimensional extended state observer
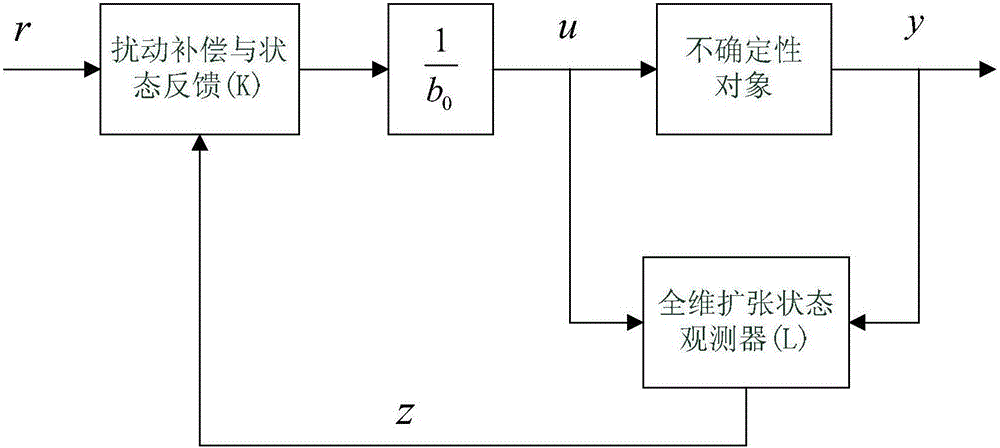
[0122] First, establish the extended state space model of the system, and select the system state variable group x 1 =y, x 3 =f, where f is an equivalent disturb...
Embodiment 2
[0168] Embodiment 2: The following is a practical application example of the present invention, and the practical application of the method of the present invention is verified through the speed control of a DC motor.
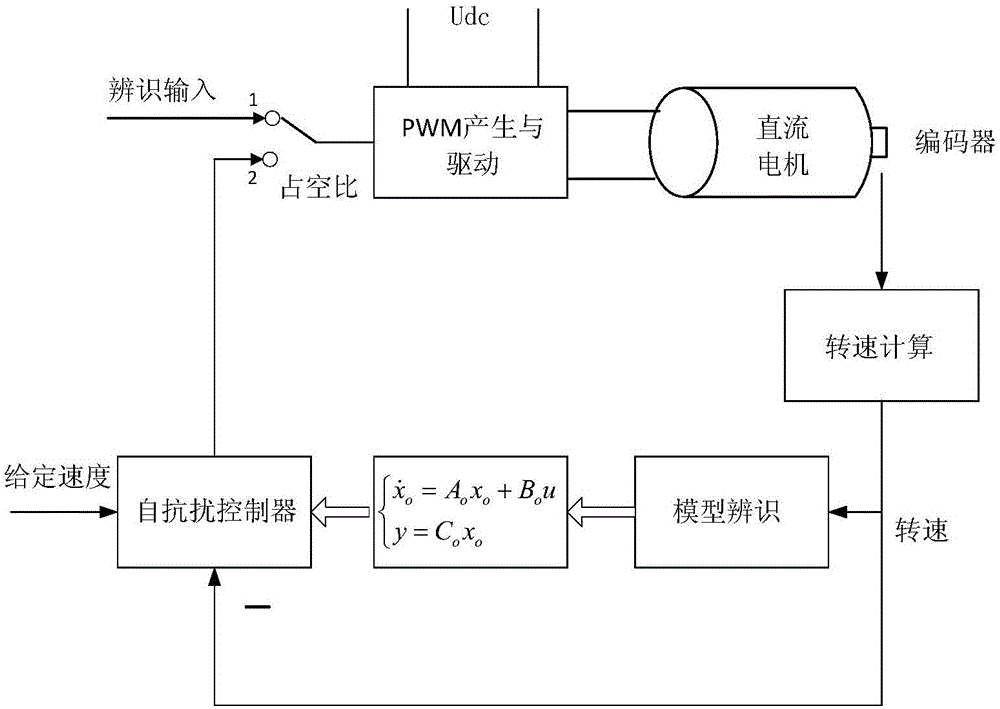
[0169] image 3 Shown is a schematic diagram of the application of the ADRC method including the method of the present invention in the motor speed control. The device is composed of DC motor, PWM generation and drive, active disturbance rejection controller, speed calculation and model identification. Among them, the encoder is installed on the brushed DC motor, the output pulse signal enters the speed calculation module, and the speed calculation module outputs the speed of the motor rotation (rev / s); after the given speed is subtracted from the actual speed of the motor to obtain the speed error, the automatic The anti-disturbance controller outputs the duty ratio to the PWM generator and the driving device; the driving device supplies the motor with the wo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More