

Unmanned aerial vehicle vision navigation landing system based on multi-scale marker
A technology of visual navigation and navigation system, which is applied in the field of unmanned aerial vehicle (UAV) and computer vision for short , the effect of improving the accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described below in conjunction with the accompanying drawings.
[0034] refer to Figure 1 to Figure 7 , a UAV visual navigation and landing system based on multi-scale markers,
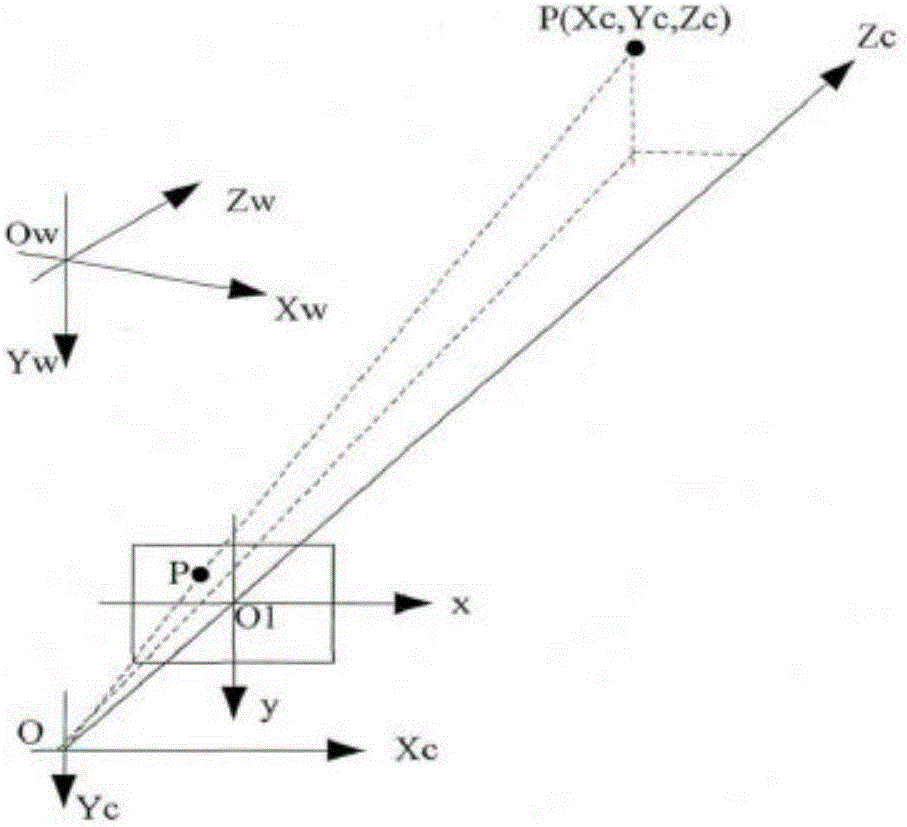
[0035] Define the coordinate system, arrange the markers in the area to be landed, establish the geometric relationship between the ground markers and the images collected by the drone, and define the following coordinate systems.
[0036] World coordinate system (w: O w -W x W y W z ), the camera coordinate system (C:O c -C x C y C z), UAV coordinate system (B:O b -B x B y B z ), image coordinate system (I: uv)
[0037] Since the system assumes that the camera is installed vertically at the center of gravity of the drone, and the direction is vertically downward, the relationship between the camera coordinate system and the drone coordinate system is fixed, and the coordinate systems can be transformed through rotation and translation;
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More